
ID : 3078
電動ハンドを使用する場合の注意事項
ロボットコントローラどうしの通信方法として、EthernetとEtherCATを併用する場合、マスターコントローラには、電動ハンドコントロールボードを装着できません(EtherCATマスターボードと電動ハンドコントロールボードがともにPCIボードであるため)。
その場合において、マスターコントローラにつながっているロボットにて電動ハンドを使用したいときは、スレーブコントローラに電動ハンドコントロールボード2CHを装着します。
スレーブコントローラに装着した電動ハンドコントロールボード2CHから、マスターコントローラおよびスレーブコントローラにつながっている各ロボットの電動ハンドへと配線します (下の図を参照してください)。
3台以上のロボットを連動させる場合も、使用する電動ハンドの数に応じて、各スレーブコントローラに電動ハンドコントロールボード(1CH または 2CH)を装着してください。
スレーブコントローラに装着した電動ハンドコントロールボード(1CH または 2CH)の制御は、マスターコントローラで行えます。電動ハンドコントロールボードの制御方法については"協調機能での電動ハンドの使い方"を参照してください。
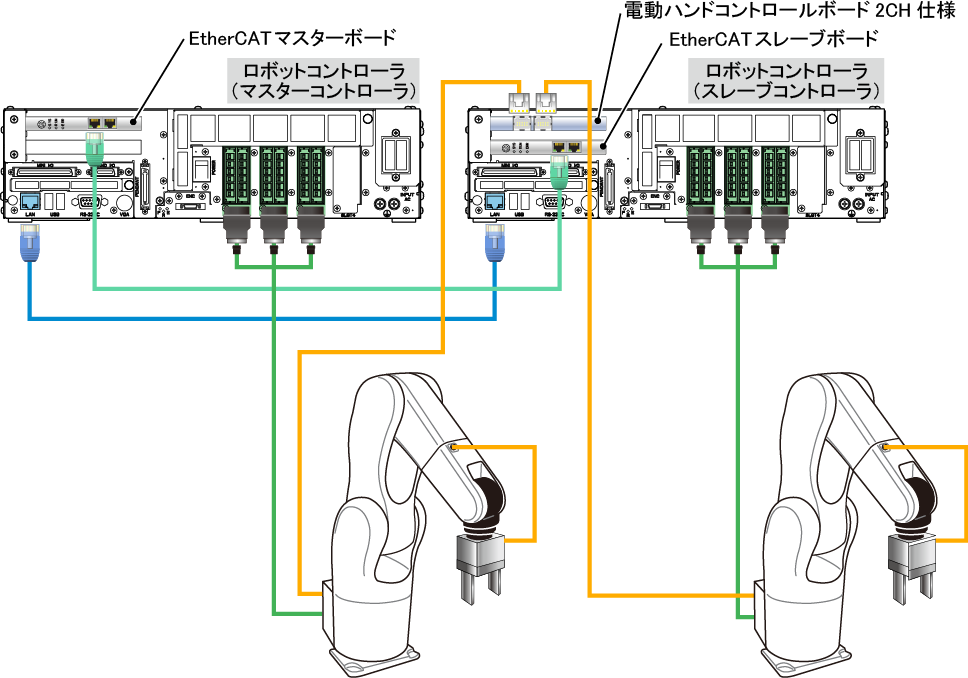
上の図は、電動ハンドの接続方法がB接続の場合の例です。
なお、電動ハンドコントロールボードのライセンスは、ボードの数分必要です。それらのライセンスは、電動ハンドコントロールボードを装着するロボットコントローラ用のものをご用意ください。例えば、マスターコントローラ用のライセンスを購入し、マスターコントローラにそのライセンスを登録しても、スレーブコントローラの電動ハンドコントロールボードは使用できません。
ID : 3078