
ID : 2944
協調機能時のバーチャルフェンス設定方法
協調機能とバーチャルフェンスを併用する場合は以下のように設定してください。
協調機能とバーチャルフェンスを併用するには、ロボットコントローラのソフトウェアバージョンが2.2.*以上である必要があります。
手順
バーチャルフェンス機能の設定を行ってから、協調機能の設定を行います。
設備モデルは、協調のマスタコントローラで作成したモデルをスレーブコントローラでも使用します。
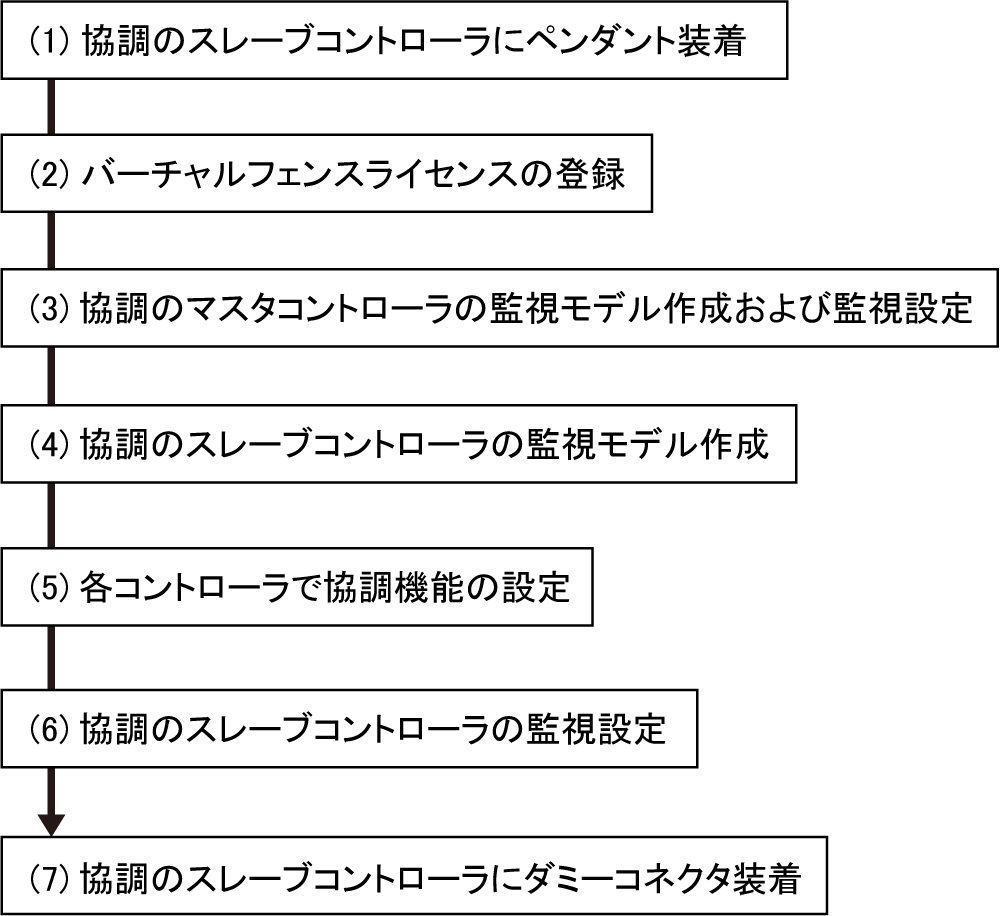
(1)協調のスレーブコントローラにペンダント装着
協調のスレーブコントローラの電源をOFFします。
ティーチングペンダントを装着後、協調のスレーブコントローラの電源をONします。エラーが出た場合は、解除してください。
(2)バーチャルフェンスライセンスの登録
協調のマスタコントローラにバーチャルフェンスライセンスを登録します。協調のスレーブコントローラへの登録は不要です。
入力操作については、ティーチングペンダント操作ガイドの「機能拡張画面の表示、追加/削除」を参照してください。
すでにライセンスが登録されている場合、この操作は必要ありません。
(3)協調のマスタコントローラの監視モデル作成および監視設定
協調のマスタコントローラでバーチャルフェンスの監視モデルの作成を行います。
詳しい監視モデルの作成方法は「監視モデルの作成」を、監視の設定は「監視の設定」を参照してください。
(4)協調のスレーブコントローラの監視モデル作成
協調のスレーブコントローラでバーチャルフェンスの監視モデルの作成を行います。
詳しい監視モデルの作成方法は「監視モデルの作成」を参照してください。
(5)各コントローラで協調機能の設定
協調機能の詳しい設定方法は協調機能ガイドの「セットアップ手順」を参照してください。
(6)協調のスレーブコントローラの監視設定
協調のマスタコントローラで、協調のスレーブコントローラの監視の設定を行います。
以下の手順で行います。
1
画面上部の「ロボット選択ボタン」を押すと、下図のような「ロボット選択」画面が開きますので、[R1](協調のスレーブコントローラ)を選択し、[OK]を押します。
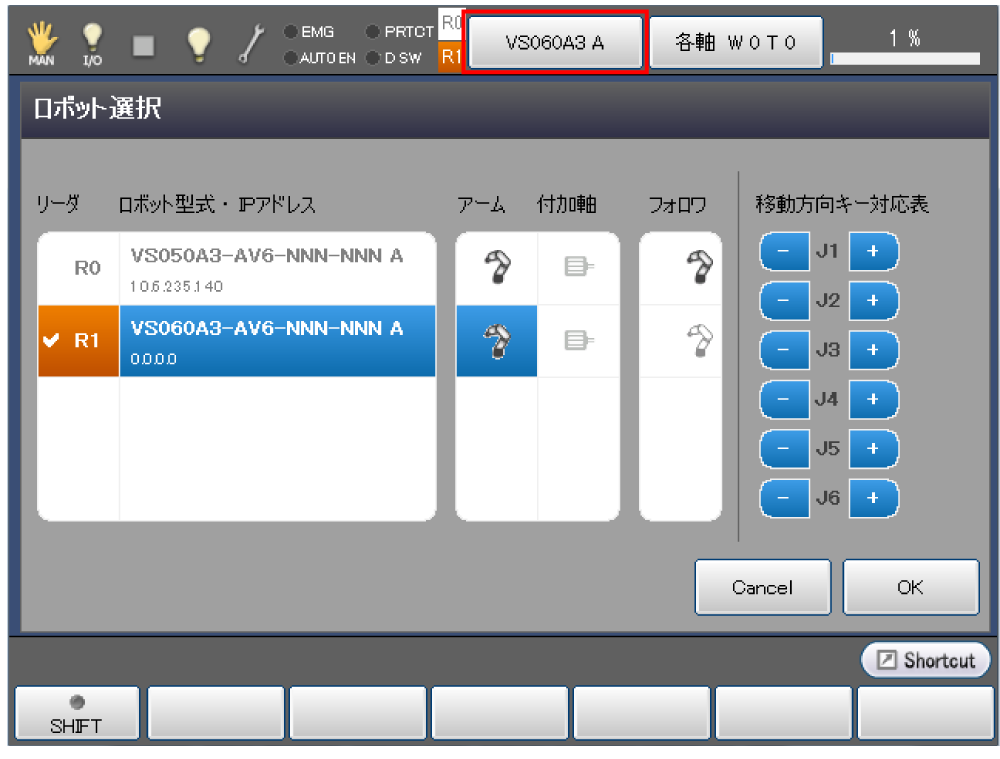
2
画像上部の[R1]がオレンジ色になっていることを確認し、「監視の設定」の手順で設定を行います。

設備モデルは、協調のマスタコントローラで作成したモデルをスレーブコントローラでも使用します。
(7)協調のスレーブコントローラにダミーコネクタ装着
協調のマスタ/スレーブコントローラの電源をOFFします。
スレーブコントローラに装着してあるペンダントをはずし、ダミーコネクタを装着後、協調のマスタ/スレーブコントローラの電源を同時にONします。起動後、バーチャルフェンス機能と協調機能が有効になります。
ID : 2944