
ID : 3053
バーチャルフェンス使用時の便利な機能
バーチャルフェンスをより便利に使用する機能を紹介します。
事前チェックコマンド
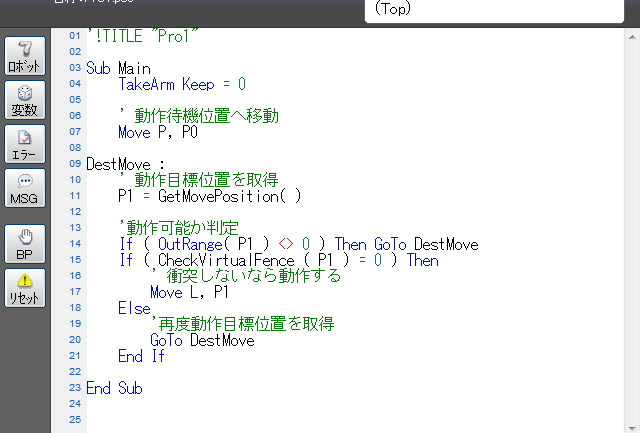
CheckVirtualFenceコマンドは、バーチャルフェンス機能有効時に、目標位置におけるロボットと設備の衝突状態をチェックするコマンドです。
ロボットを動作させて、ロボットが設備と衝突することをバーチャルフェンス機能が検出すると、エラーが発生しロボットは停止します。しかし、CheckVirtualFenceコマンドでは、ロボットを動作させずに、目標位置でロボットが設備と衝突するかをチェックできるので、エラーでロボットが停止することなく動き続けるようにプログラミングすることができます。
ビジョンピッキングのような、運転時に動作目標位置が変化する設備に使用すると便利です。
詳細は、プログラマーズマニュアルの「CheckVirtualFence」を参照してください。
このコマンドはVer.2.3.*から有効です。
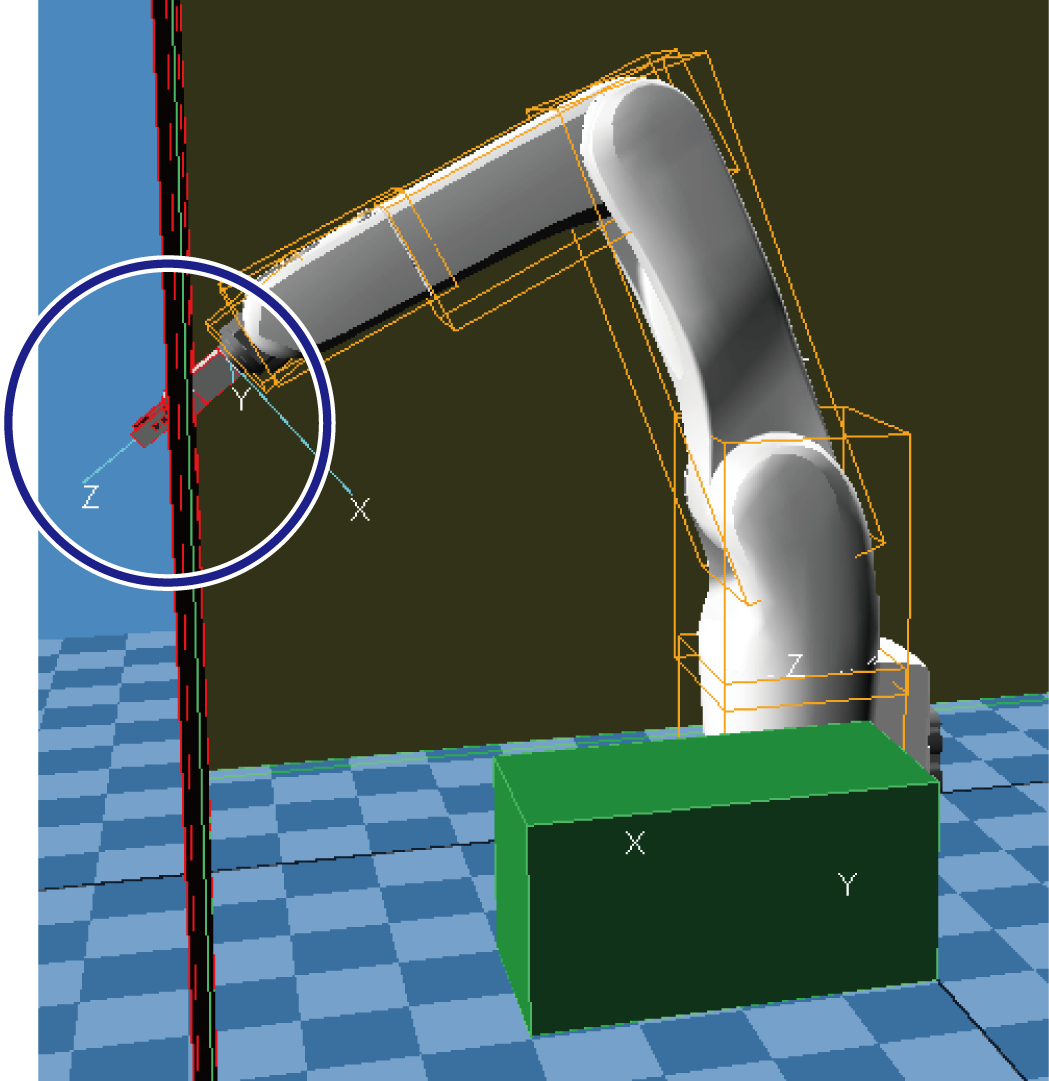
衝突状態表示
衝突状態表示機能は、WINCAPSIIIで監視モデル同士の衝突を検出した際、どの監視モデル同士が衝突しているかを表示する機能です。
この機能を使用することで、監視モデルの調整中にモデルの修正やロボット動作の修正が容易になります。
詳細は、WINCAPSIIIガイドの「アーム」メニューの「干渉チェック」を参照してください。
この機能はVer.2.3.*から有効です。
ID : 3053