
ID : 2241
監視の設定
操作経路:基本画面 - [F2 アーム] - [F6 補助機能] - [F2 衝突/干渉]

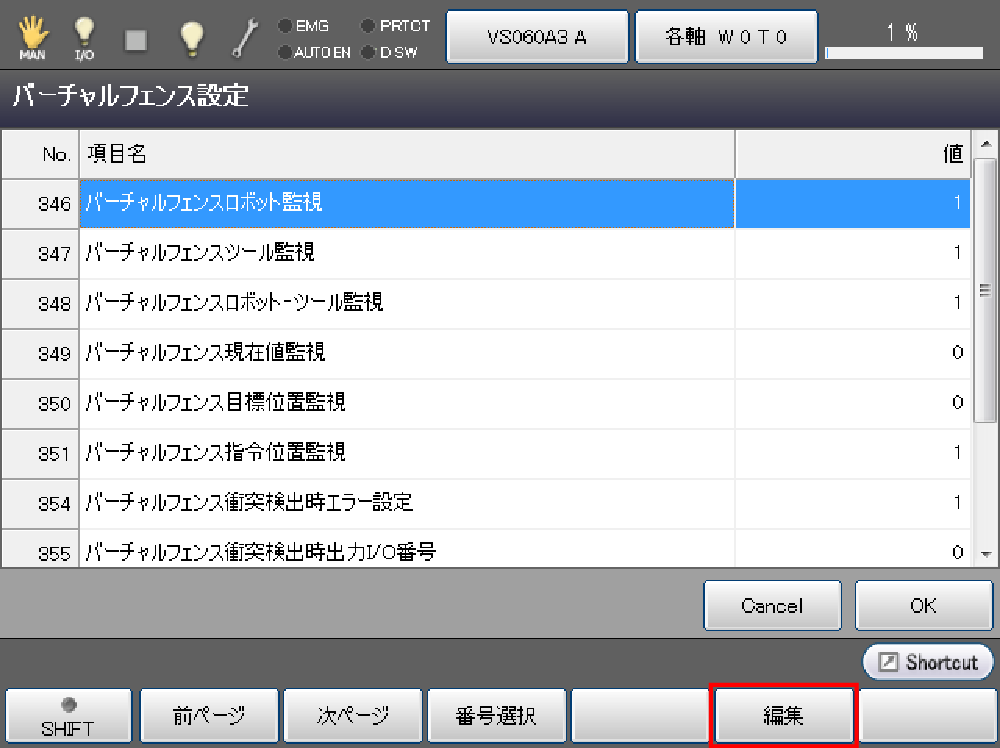
[F2 バーチャルフェンス]を押して画面を開きます。

監視の設定を行います。[F7設定]を押すと各パラメータが表示されますので、「366:バーチャルフェンス設定」を有効にし、必要があれば他パラメータのデフォルト値の変更を行います。値の変更は[F5編集]を押してください。
パラメータ一覧
ロボットの停止処理は、エラーの発生で実現しているので、[354:バーチャルフェンス衝突検出時エラー設定]を有効にしておかないと、衝突を検知してもロボットは停止しません。
| 番号 | 項目名 | 単位 | 初期設定 | 内容 |
|---|---|---|---|---|
| 346 | バーチャルフェンスロボット監視 | - | 1 | ロボットと設備の監視を行います。 0:無効 1:有効 |
| 347 | バーチャルフェンスツール監視 | - | 1 | ツールと設備の監視を行います。 0:無効 1:有効 |
| 348 | バーチャルフェンスロボット-ツール監視 | - | 1 | ロボットとツールの監視を行います。 0:無効 1:有効 |
| 349 | バーチャルフェンス現在値監視 | - | 0 | 現在値の監視を行います。 0:無効 1:有効 |
| 350 | バーチャルフェンス目標位置監視 | - | 0 | 目標位置の監視を行います。 有効にすると、動作開始時に衝突するかを判断します。 |
| 351 | バーチャルフェンス指令位置監視 | - | 1 | 指令位置の監視を行います。 有効にすると、動作中に衝突するかを判断します。 |
| 353 | バーチャルフェンス監視周期 | ms | 8 | 監視周期を設定します。 |
| 354 | バーチャルフェンス衝突検出時エラー設定 | - | 1 | 衝突を検出したときにエラー出力するかしないかを設定できます。 0:無効 1:有効 |
| 355 | バーチャルフェンス衝突検出時出力I/O番号 | - | 0 | 出力するI/O番号を設定します。(現在値での検出時のみ有効) |
| 356 | バーチャルフェンスロボット間監視 | - | 1 | ロボット間の監視を行います。(協調機能有効時のみ) 0:無効 1:有効 |
| 366 | バーチャルフェンス設定 | - | 0 | バーチャルフェンス機能の設定を行います。 再起動後に設定が有効になります。 |
| 370 | バーチャルフェンスロボット間監視モデル拡張サイズ | mm | 100 | 協調動作時のロボット間の監視において、安全のために監視モデルを拡張するサイズを設定します。 |
協調機能時のスレーブロボットの監視設定は、マスタロボットの設定が適用されます。
(Ver2.2.*以降)
監視周期タイムアウトが発生した場合、まず監視モデルを減らしてください。効果がない場合は、パラメータ「353:バーチャルフェンス監視周期」を8msから延ばしてください。
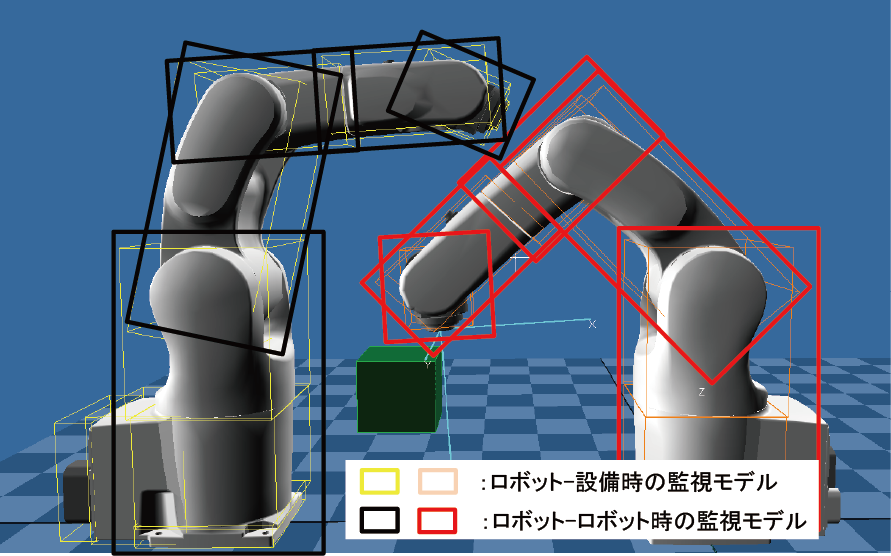
ロボット間監視モデルの拡張
協調機能で複数のロボットを動作させる場合、初期設定では、安全のため、監視モデルのサイズを大きくして監視を行っています。
この拡張サイズは、パラメータ「370:バーチャルフェンスロボット間監視モデル拡張サイズ」で設定ができます。デフォルト値ではエラーになってしまう隙間の少ない動作でも、適切に変更することで、安全に動かすことができます。
なお、拡張サイズの変更にあたっては、どれくらいの大きさであれば、ロボット同士が衝突することなく動作できるかを検証のうえ、お客様の判断で変更してください。
ID : 2241