
ID : 2242
監視の開始/終了
ティーチングペンダント、ミニペンダント、コマンドを使って、監視を終了したり、開始したりすることができます。
コントローラ起動時の監視の開始
パラメータ[366:バーチャルフェンス設定]を有効にしておくと、コントローラ起動時に監視を開始します。
- バーチャルフェンス機能が有効でない場合は、ティーチングペンダント、ミニペンダント、コマンドで開始を行っても監視は開始しません。
- パラメータを変更した場合は、再起動してください。
ティーチングペンダントでの監視の開始/終了
監視の開始/終了を行う場合は、パラメータの[366:バーチャルフェンス設定]を有効にしておく必要があります。
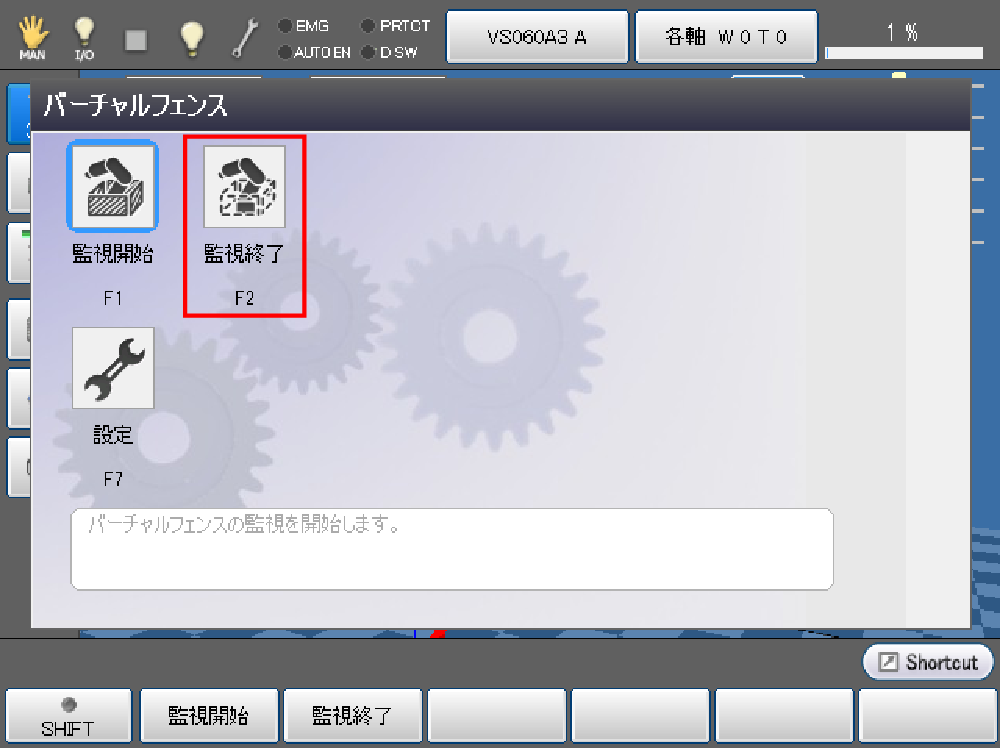
監視の終了
操作経路:基本画面 - [F2 アーム] - [F6 補助機能] - [F2 衝突/干渉] - [F2 バーチャルフェンス]
[F2 監視終了]で監視を終了します。
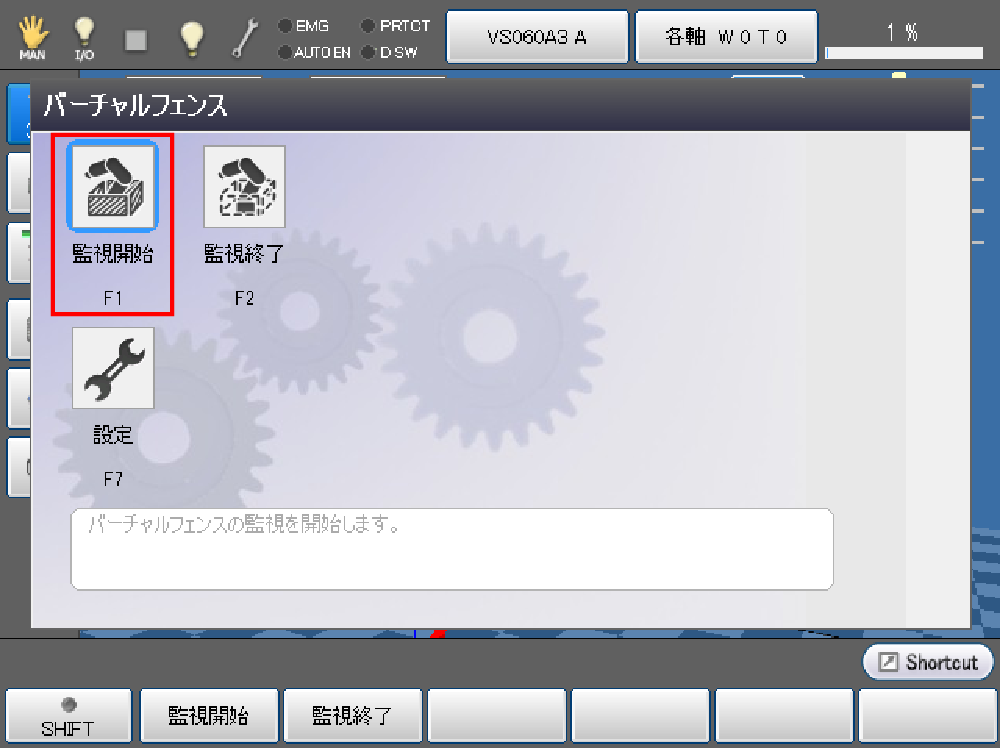
監視の開始
監視していない状態から監視を開始するには、[F1 監視開始]を押します。
ミニペンダントでの監視の開始/終了
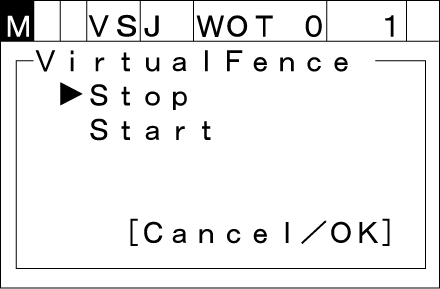
監視の終了
操作経路:基本画面 - [補助機能] - [ArmAux] - [VF]
[Stop]を選択してOKボタンを押すと、監視を終了します。
監視の開始
監視していない状態から監視を開始するには、[Start]を選択してOKボタンを押します。
コマンドでの監視の開始/終了
「VirtualFence」コマンドを使って監視の開始/終了を行います。詳しくは「VirtualFence」を参照してください。
干渉時の回避方法
監視対象が干渉してしまった場合、ティーチングペンダントまたはミニペンダントで一時的に監視モデルの監視を終了し、手動動作でロボットを退避させた後、ティーチングペンダントまたはミニペンダントで監視モデルの監視を再開してください。
ID : 2242