
ID : 2272
走行軸
ロボットと付加軸を連動させたい場合は、WINCAPSIIIの対応軸機能を使って、走行軸モデルを作成します。
走行軸モデルの作成方法
アームモデリングの階層のRobotNodeとロボットモデルの間にオブジェクトを設定し、設定したオブジェクトが付加軸として動作するように設定します。
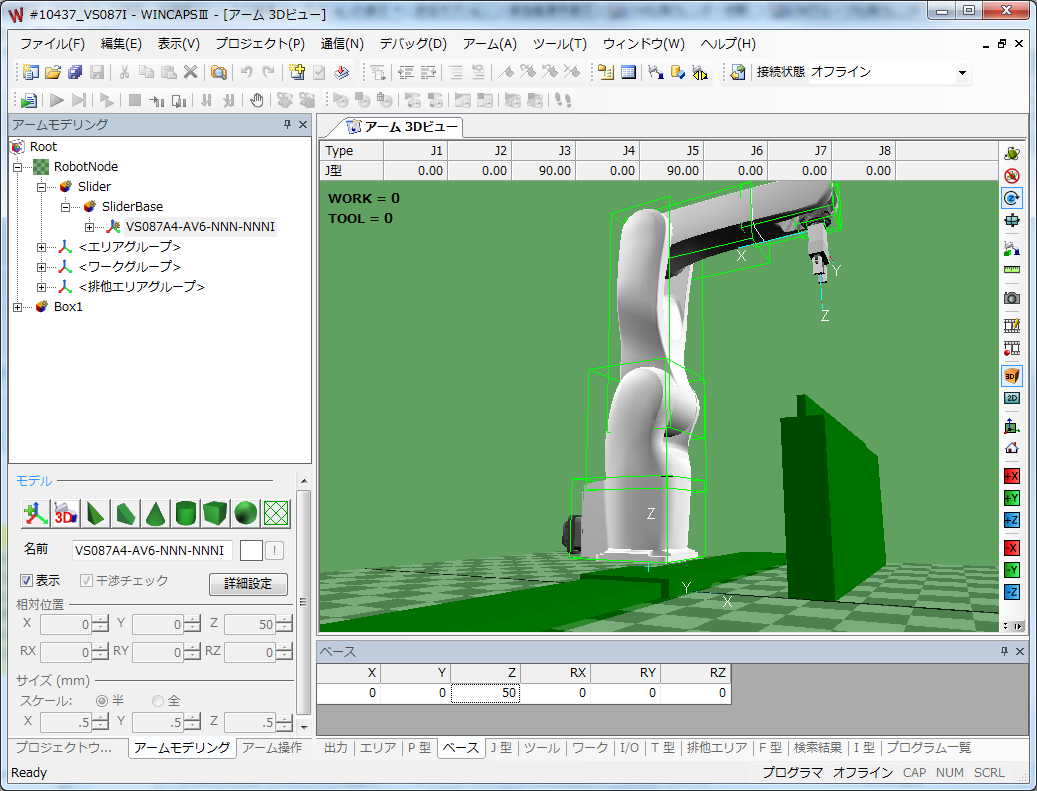
ここではSliderにSliderBaseを設置し、その上にロボットが乗っているモデルを想定します。設置したSliderBaseが、J7軸としてX軸方向に動く走行軸モデルを作成します。
- 「軸設定表」の「軸有効無効設定」で、必要な軸を有効にします。
- 「ユーザ」パラメータで「190:起動時BASE番号」を有効にします。
1
RobotNodeを選択し、Sliderオブジェクトを追加します。
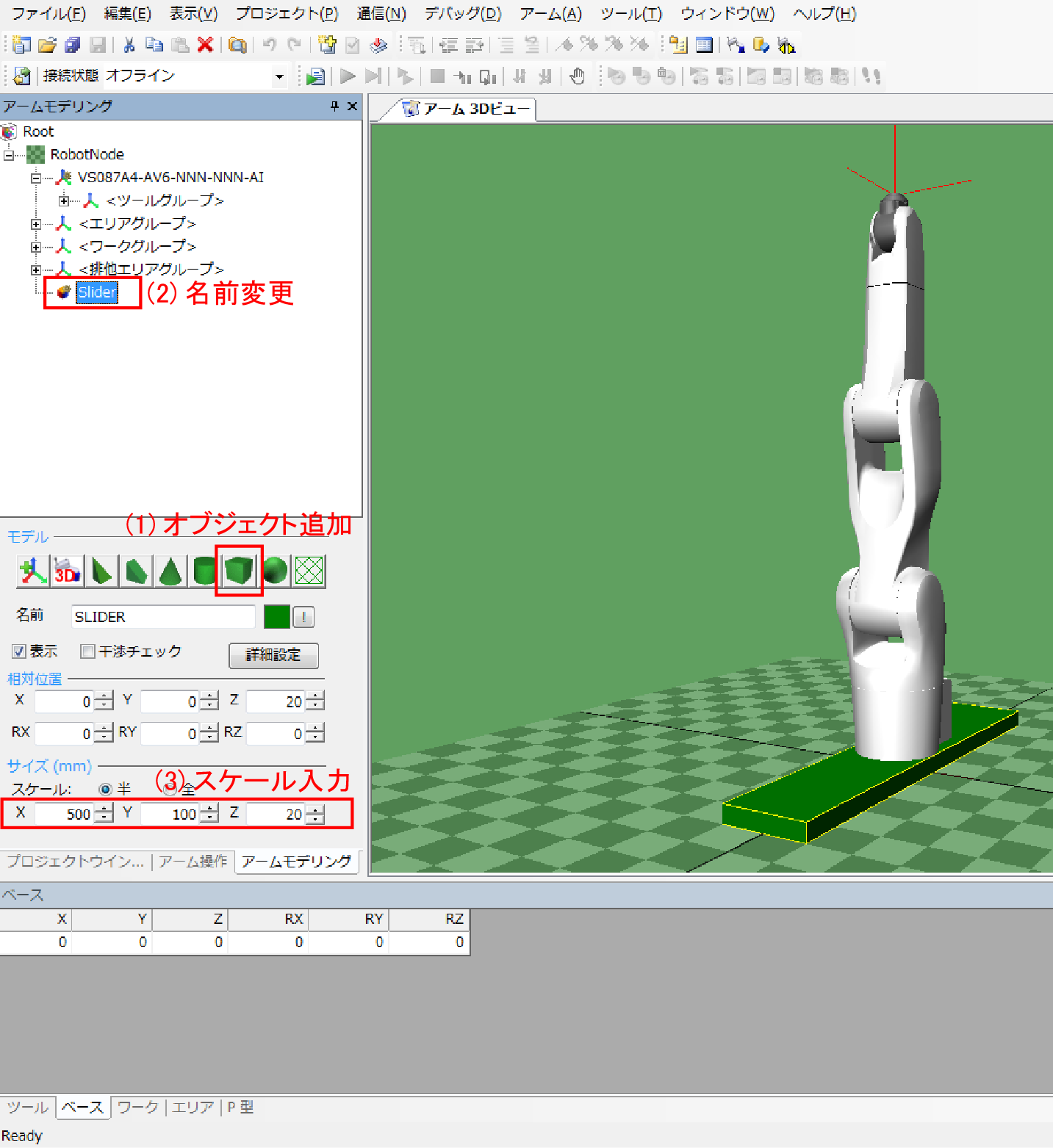
2
Sliderオブジェクトを、RobotNodeとロボットモデルの間に移動させます。
3
Sliderオブジェクトの下にSliderBaseオブジェクトを追加します。
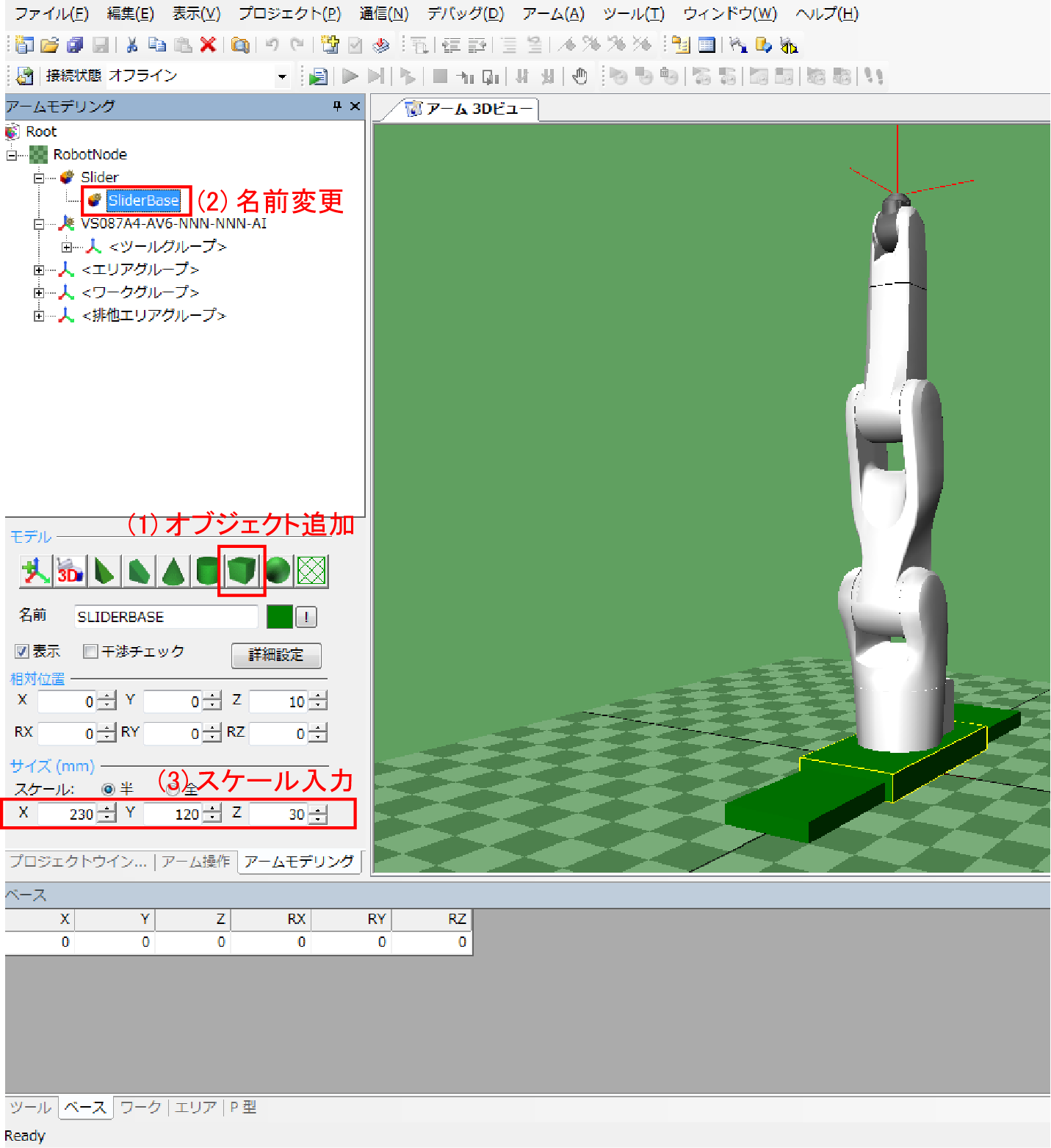
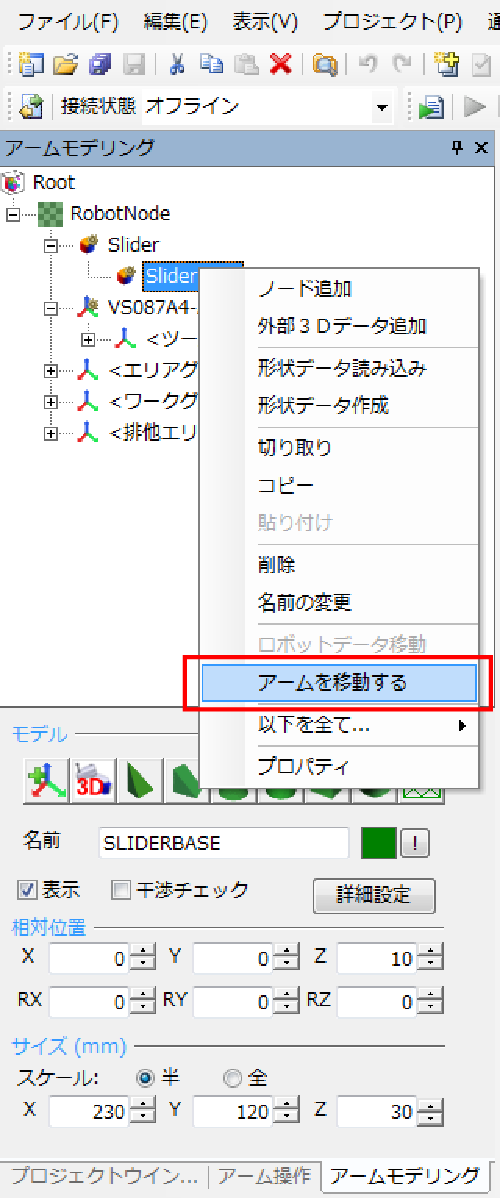
4
SliderBaseオブジェクトを選択し、右クリックするとウィンドウが表示されます。
「アームを移動する」を押すと、ロボットオブジェクトがSliderBaseの下に移動します。
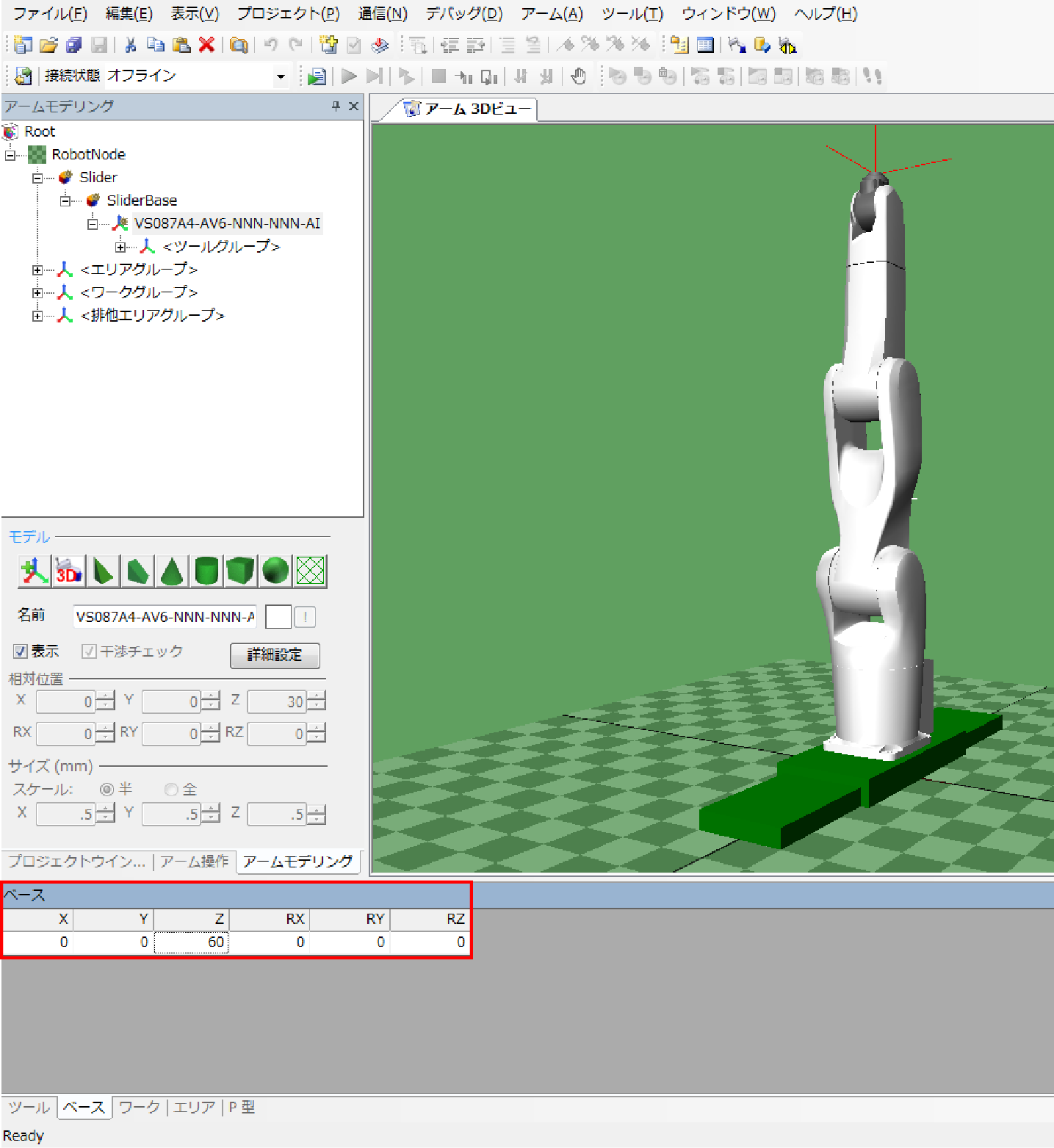
5
ロボットオブジェクトをSliderBaseに乗せるためには、Z軸方向の位置を変更する必要があります。
ロボットオブジェクトの相対位置は変更できないため、ベース座標を変更します。
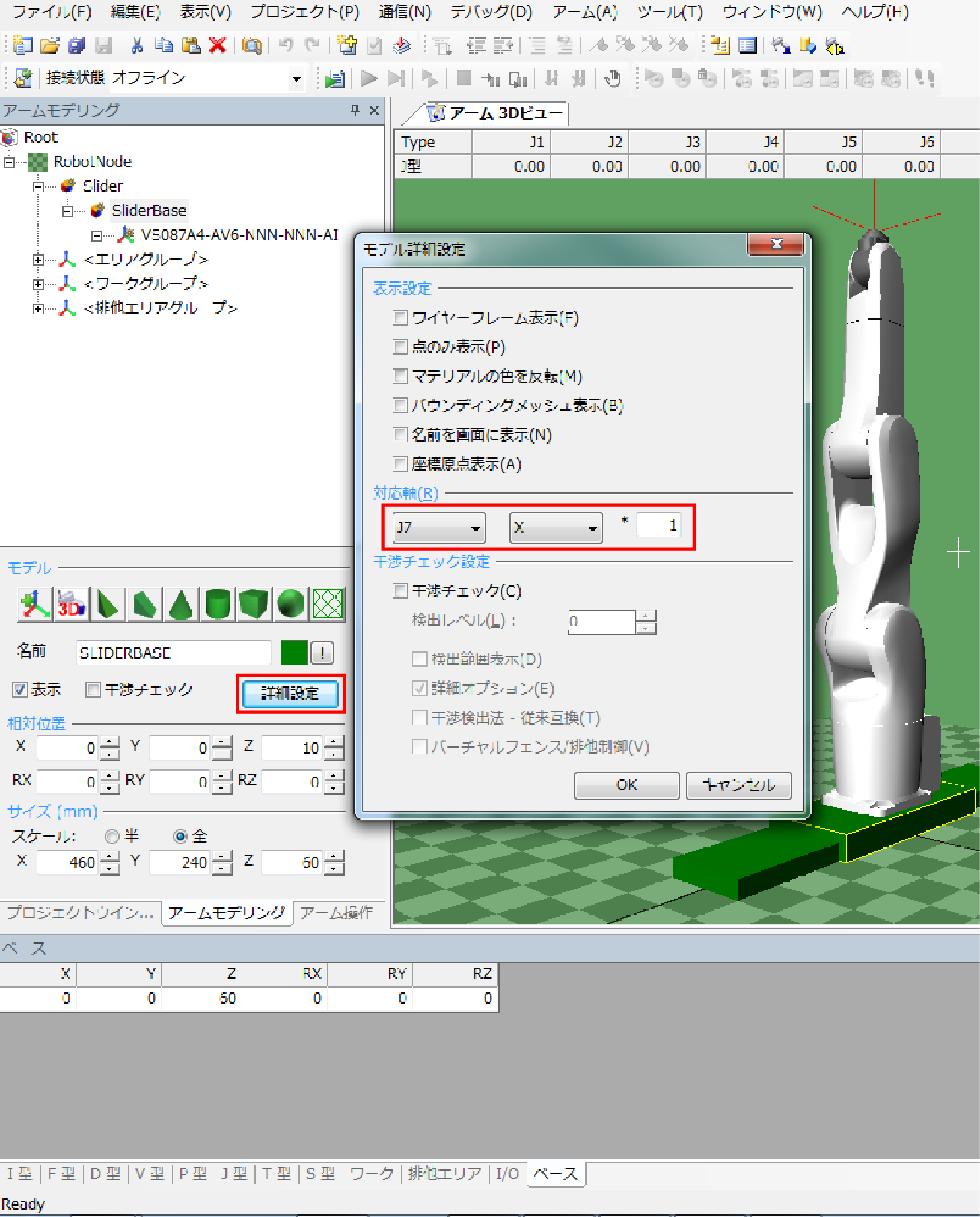
6
連動させたい軸を選択し「詳細設定」より「モデル詳細設定」を開き、「対応軸」を設定します。
ここでは、J7軸をX軸方向に動かすように設定します。
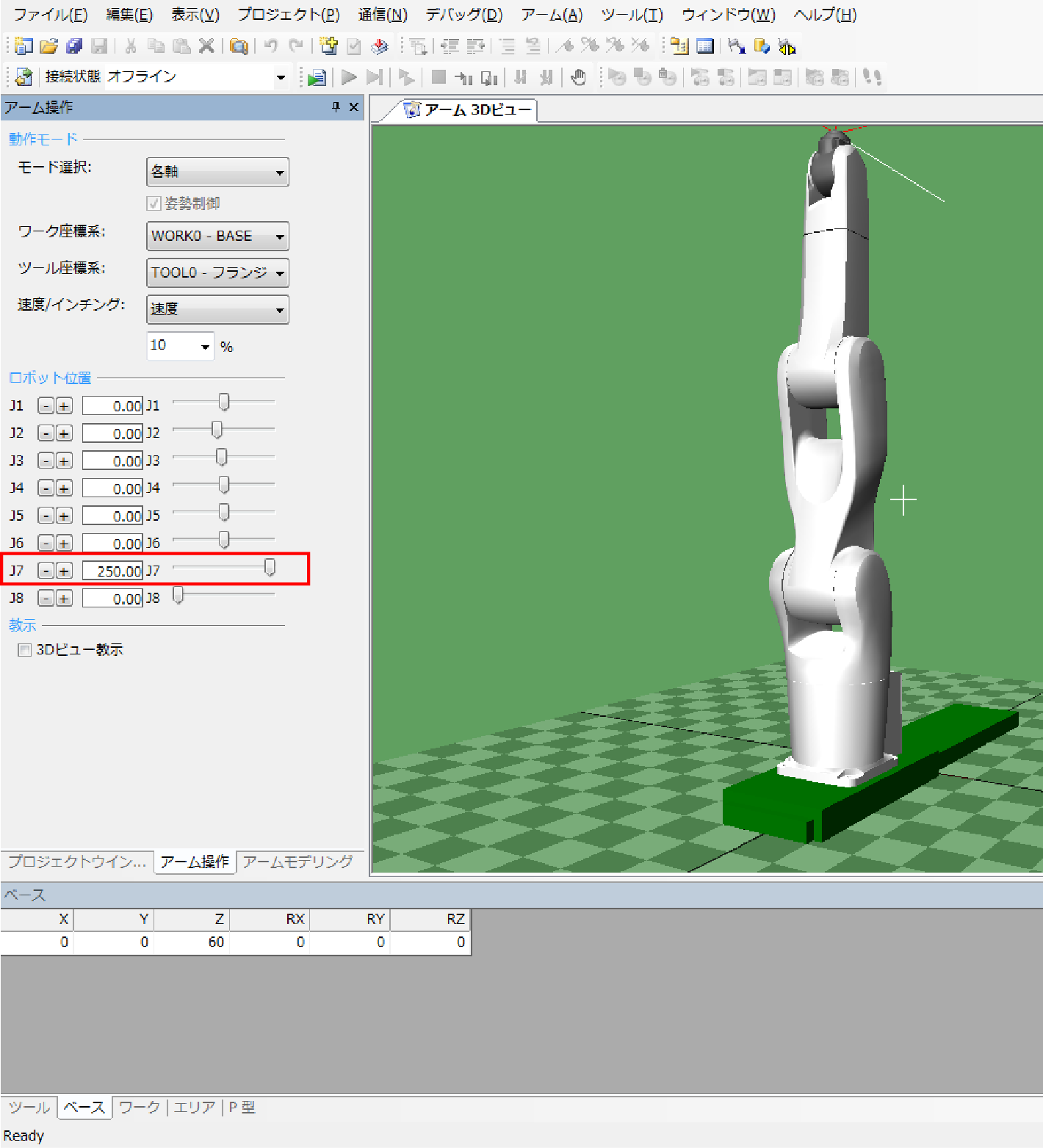
7
アーム操作でJ7の動作確認を行い完成です。
ID : 2272