
ID : 2238
機能説明
監視対象
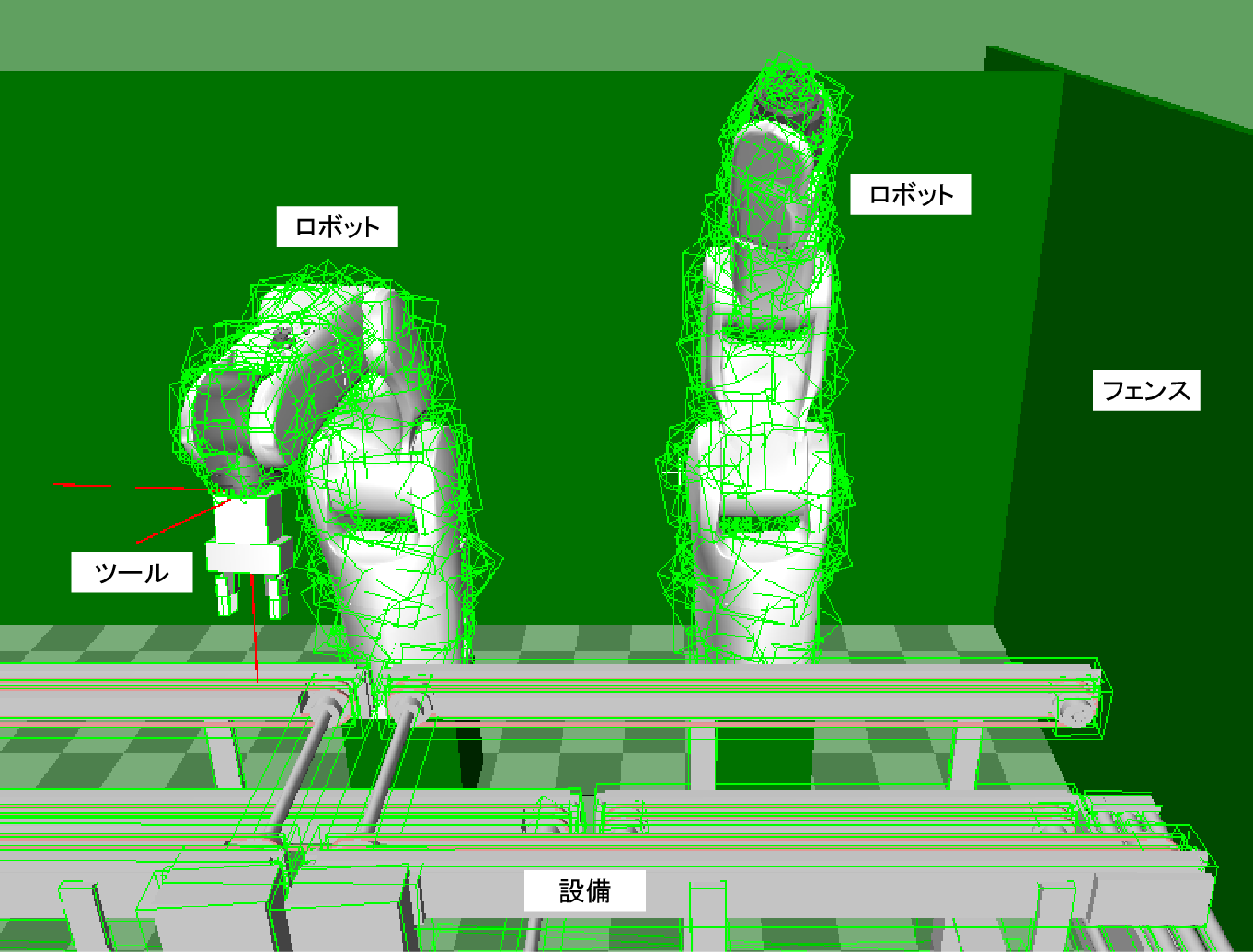
下記を監視対象として設定できます。
- ロボット、設備(フェンス含む)、ツール
パラメータで組合せを選択できます。
・ロボットと設備(フェンス含む)
・ロボットとツール
・ツールと設備 (フェンス含む)
・ロボットとロボット(※1)
(※1)ロボット間の監視は協調機能有効時のみ可能です - 現在値、指令位置、目標位置
パラメータで設定できます。
全てを同時に監視することができます。
モデル数が多く、処理時間が長すぎるときは、モデル数を減らしたり、パラメータのチェックをはずす事で処理時間を短くすることができます。
このとき、現在値、指令位置、目標位置のいずれか一つにはチェックを入れてください。
モデル化の方法
この機能ではWINCAPSIIIのアームモデリング機能を使い、監視対象のツールや設備を任意の形状に設定することができます。
また、外部の設備データを設定することもできます。
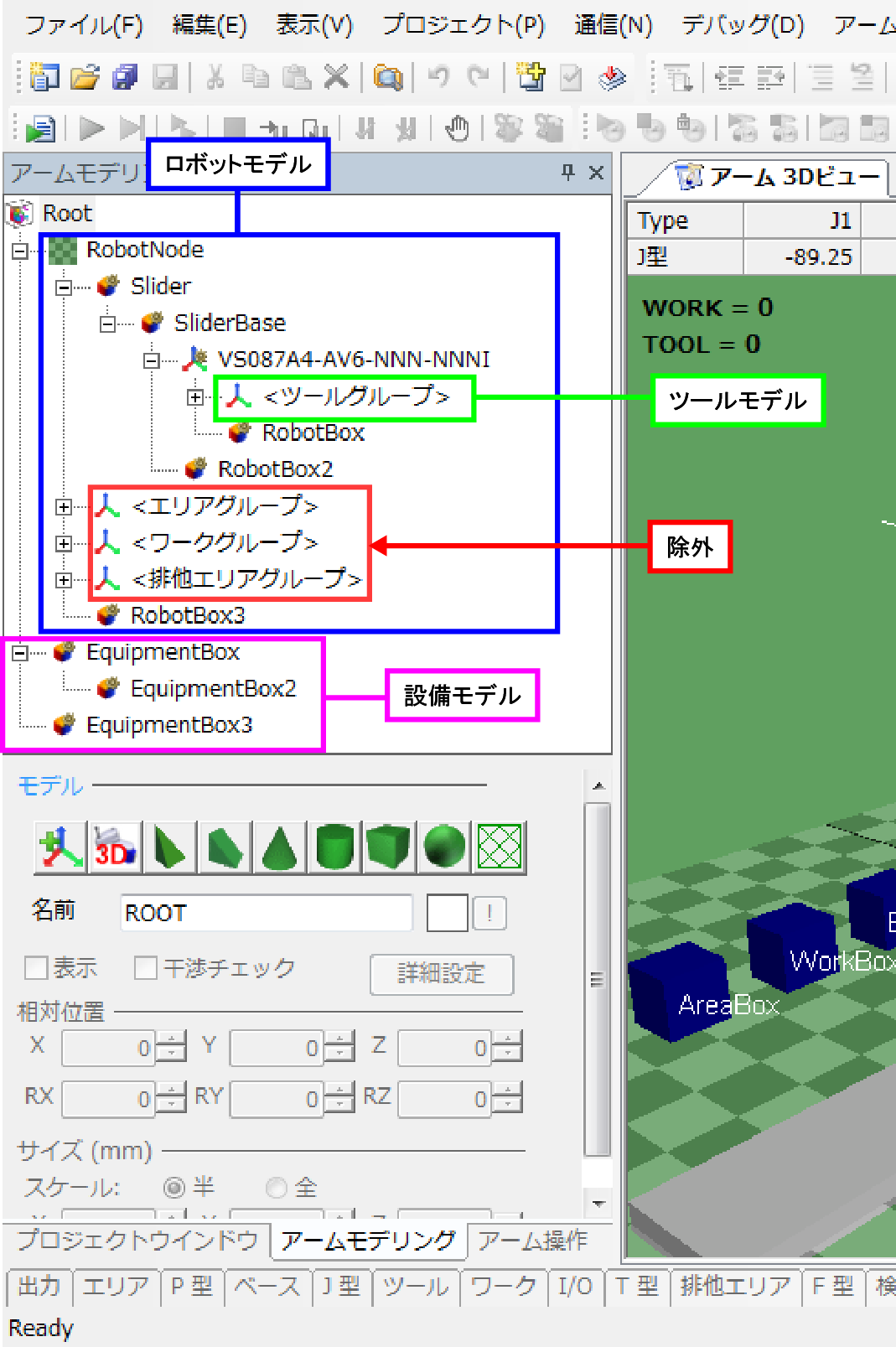
監視モデル作成時の制約
各監視モデルは指定の階層に作成してください。
| 監視モデル名 | 制約 | 詳細 |
|---|---|---|
| ロボットモデル | Robot Node以下で、ツールグループ、エリアグループ、ワークグループ、排他グループ以下を除くオブジェクト。 | - |
| ツールモデル | ツールグループ以下のオブジェクト。 | ツール番号以下のツールモデルはツール番号変更後、有効になります。 ツールグループ直下のツールモデルはツール番号とは関係なく監視します。 |
| 設備モデル | Root直下にあり、Robot Nodeを除くオブジェクト。 | - |
ID : 2238