文字サイズ
<< 前へ 次へ >>
ID : 2288
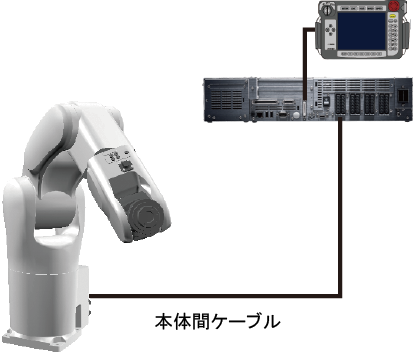
ロボット単独の場合は、下図のようにコントローラ1台のみで成立し、外部機器との通信はありません。
複数ロボットの場合は、協調機能を使いロボット同士の衝突を検知します。協調機能のシステム構成については、協調機能ガイドの「システム構成」を参照してください。