
ID : 1983
システム構成
協調機能のシステム構成図は下図のとおりです。
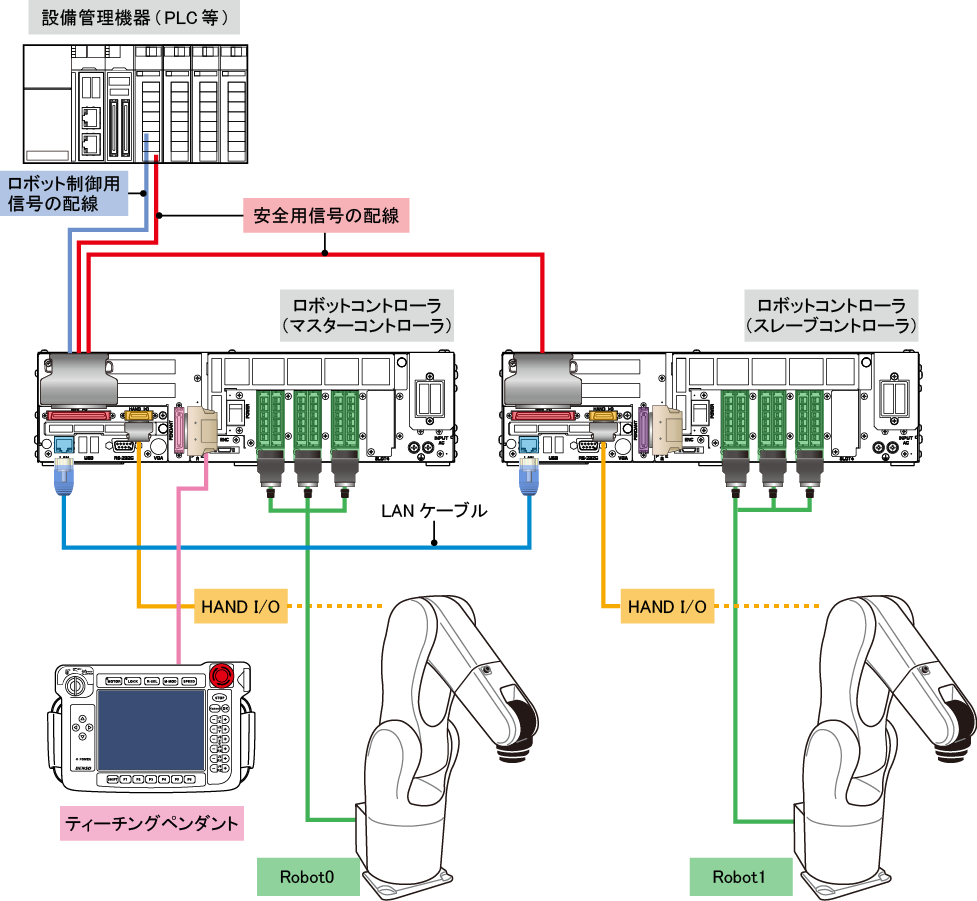
- マスターコントローラ
- 連動させるロボットを制御するロボットコントローラの中で、設備管理機器と、ロボット制御用信号の配線がつながっているロボットコントローラを、マスターコントローラと呼びます。
連動させるロボットの動作はマスターコントローラが管理します。したがって、 設備管理機器は、マスターコントローラにのみロボットの動作指示をするだけで、複数台のロボットを連動して動作させることができます。 - スレーブコントローラ
- 連動させるロボットを制御するロボットコントローラの中で、マスターコントローラ以外のロボットコントローラを、スレーブコントローラと呼びます。マスターコントローラからの指示に従い、ロボット(上図だとRobot1)を制御します。
- Robot0、Robot1
- 連動させるロボットには、"Robot0"、"Robot1"といったロボット名を割り振ります。ロボット名は、つながるロボットコントローラによって決められています。
マスターコントローラにつながるロボット Robot0 スレーブコントローラにつながるロボット Robot1~Robot3
ロボット名は、ロボットプログラムの中で、制御するロボットを特定するためにも使用します。 - LANケーブル
- 連動させるロボットを制御するロボットコントローラどうしをLANケーブルでつなげます。LANケーブルを介してお互いの情報を通信し合い、動作を連動します。
通信方法はEthernetによる方法と、EthernetとEtherCATの併用による方法があります。
EthernetとEtherCATを併用する場合、オプションの、EtherCATマスターボードとEtherCATスレーブーボードが必要ですが、より高い精度で連動させることができます。 - 安全用信号
- ロボットコントローラの専用入出力信号の内、非常停止信号、自動イネーブル信号など、安全に関わる信号のことを言います。これらの信号は、ロボットに動作指示するためではなく、危険な状態になりそうなときに、ロボットを停止したりするために使用する信号です。したがって、全てのロボットコントローラにつなげる必要があります。
- ロボット制御用信号
- ロボットコントローラの専用入出力信号の内、安全用信号以外の信号です。これらの信号はロボットに動作指示するための信号で、マスターコントローラにのみ配線します。上図では、Mini I/Oに配線していますが、オプションボードの、DeviceNetスレーブボードや、CC-Linkリモートデバイスボードなどを使用することで、各種フィールドネットワークでロボットに動作指示をすることができます。
- HAND I/O
- 各ロボットに装着されている、ハンドやセンサを制御するために使用します。スレーブコントローラのHAND I/Oは、マスターコントローラから制御します。
- ティーチングペンダント
- マスターコントローラにのみ装着します。スレーブコントローラにつながっているロボットも、マスターコントローラに装着されたティーチングペンダントで操作できます。
スレーブコントローラには、ダミーコネクタを装着してください。ダミーコネクタを装着しないと、スレーブコントローラにつながっているロボットは動作しません。
ミニペンダントは協調機能で使用することはできません。
接続方法の詳細は"システム設計手順"を参照してください。
ID : 1983