
ID : 1982
概要
協調機能は、複数台のロボットを連動させる機能で、長尺物・柔軟物の搬送、組立を可能にします。
この機能はVer.1.9.*より有効です。
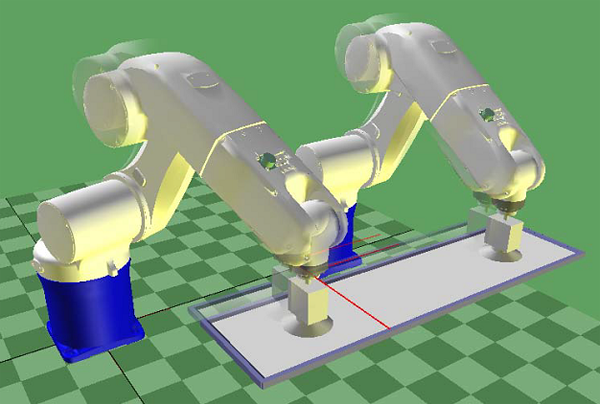
下図は2台のロボットで長尺物を搬送している例です。2台のロボットがツール先端の位置関係を保って動作することで、長尺物を変形させずに運搬することが可能です。
この機能では、複数台ロボットのプログラム作成や実行を1台のコントローラで行うようになっており、また位置の教示には複数台ロボットの共通座標を用いるようになっているため、プログラミングや各種設定を容易に行うことができます。
この機能を実行するためのシステム構成については、"システム構成"を参照してください。
具体的には次のような特長があります。
- 同期動作が可能
- 複数台のロボットを動作させるとき、動作開始と動作終了のタイミングを合わせることができます。この動作を同期動作といいます。詳細は"同期動作"を参照してください。
- 協調動作が可能
- 複数台のロボットを、ツール先端の位置関係を保ったまま同期動作をさせることができます。この動作を協調動作といいます。詳細は"協調動作"を参照してください。
- ワールド座標系で教示できる
- 協調機能では、複数台のロボットに共通な座標系を使用しており、教示位置は、複数台のロボットで共有することでできます。これにより、教示や教示位置の管理が簡単に行えます。
各ロボットに共通な座標系をワールド座標系といいます。詳細は"ワールド座標"を参照してください。 - 複数台のロボットの動きを一括管理できる
- 1台のロボットコントローラで複数台のロボットの動きが管理できると、各ロボットの動作の流れを把握しやすく、プログラムを作成しやすくなります。
協調機能は、協調動作や同期動作は使用せず、1台のロボットコントローラで複数台のロボットの動きを管理するだけ、という目的にも使用できます。 詳細は"マルチロボット"を参照してください。
ID : 1982