
ID : 1985
協調動作
機能概要
ツール先端の位置関係を保ったまま複数台のロボットが動作します。複数台のロボットによる搬送プログラムを簡単に実現できます。
例:ワーク搬送動作
2台で板状のワークを搬送する際に、ワークを傾ける動作を行わせる場合を想定します。
| 右の図において、左側のロボットを動作させたら、右側のロボットもそれに伴い動作してほしいと仮定します。この場合、左側のロボットを"リーダ"、右側のロボットを"フォロワ"と呼びます。 | 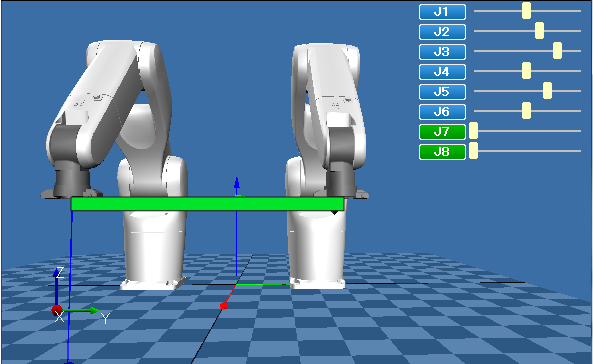 |
| リーダの手先の位置を下に動かし、角度もひねってみます。 | 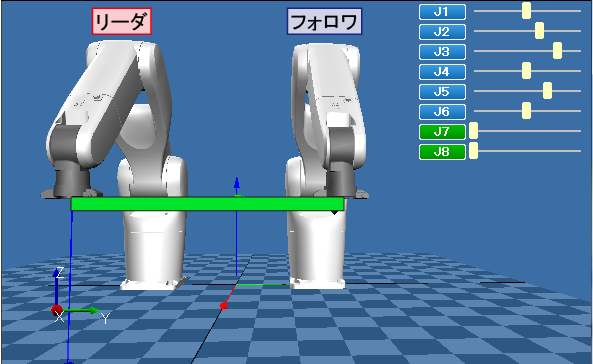 |
| フォロワも、リーダに合わせて動作します。 | 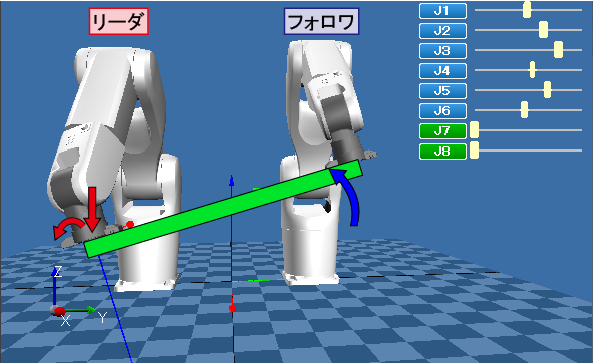 |
このように、リーダとなるロボットを決めて、リーダを動作させることで、フォロワも連動して動作します。これは、ロボットプログラムの作成時は、リーダの動きを作成するだけで、フォロワの動きも含めたプログラミングができることを意味します。
また、リーダにするロボットを動作ごとに変えた方が教示しやすい場合があります。この場合、ロボットプログラムの中で、動作ごとにリーダを変えることもできます。
付加軸について
フォロワは、リーダの付加軸と同じ軸番号の軸が、同じ動作量だけ動作します。
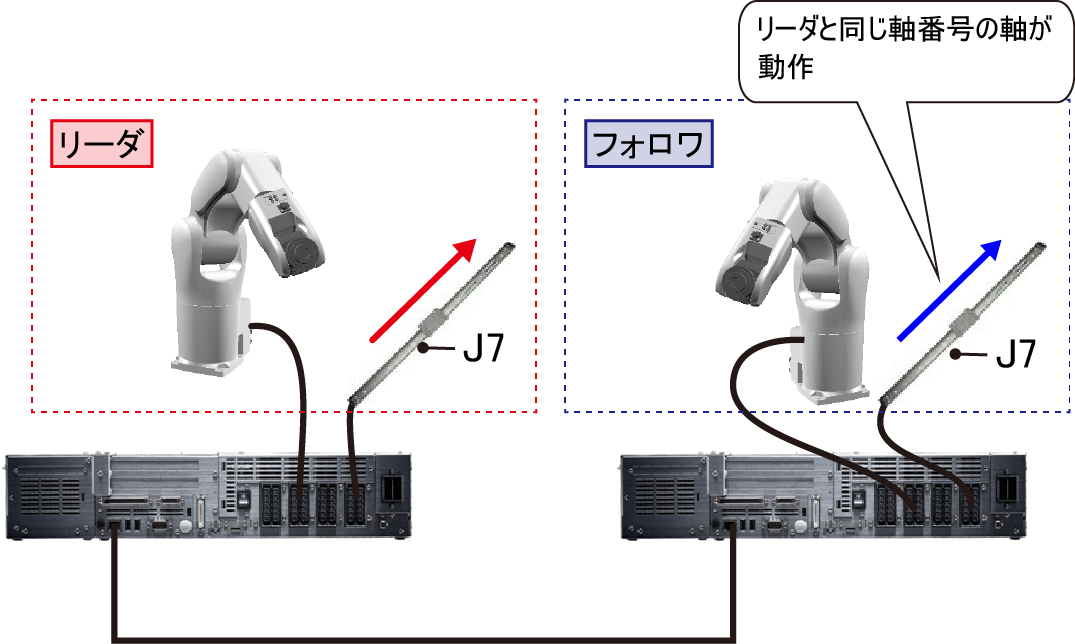
動作量、動作タイミングのみ同じになります。実際の動作は、お客様の設定および設置状況に依存します。
プログラミング
動作オプションのSyncMoveを使用します。
ID : 1985