
ID : 1986
同期動作
機能概要
複数台のロボットが、異なる動作をタイミングを合わせて行います。タイミング合わせが必要な作業を簡単に実現できます。
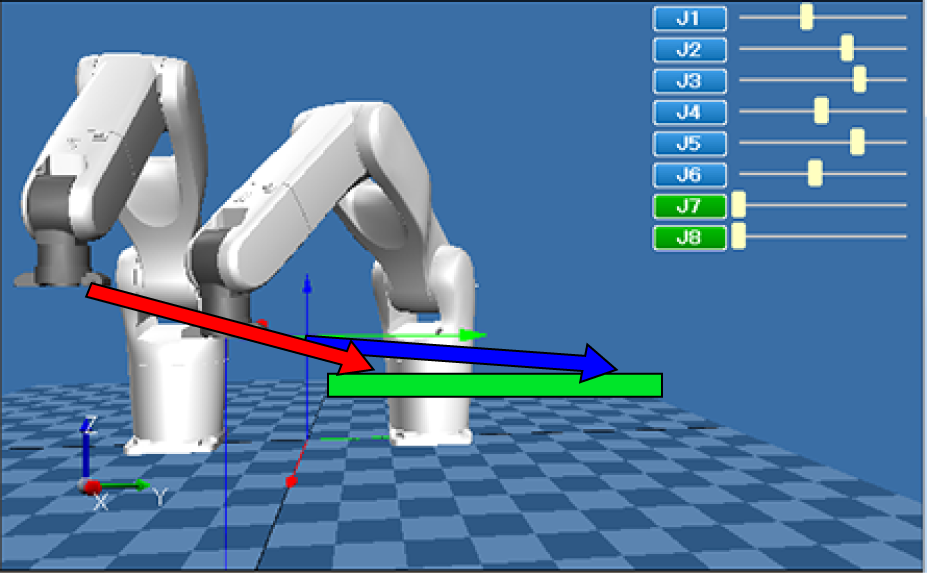
例:把持位置までの移動
近接した状態から、次の作業点へぶつからないように移動させる場合を想定します。
同期動作を使用しない場合
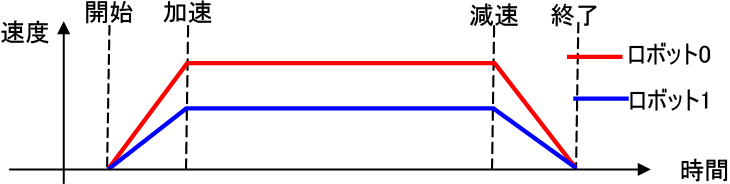
異なるコントローラ間で、下記のようなタイミングを合わせるためのプログラミングが必要で、精度良く実施しようとすると複雑なプログラムになってしまいます。
- 他ロボットが動作完了しているか確認する
- 動作速度が異ならないか確認する
- 動作を同時に開始する
- 自ロボットの動作完了を通知する など
同期動作を使用する場合
自動的にタイミングを合わせて動作するため、ユーザがタイミング合わせのプログラムを追加する必要はなく、簡単にプログラミングできます。
プログラミング
SyncTimeコマンドを使用します。
ID : 1986