
ID : 2260
WINCAPSIIIでの排他エリア設定
WINCAPSIIIのアームモデリング機能で排他エリアを作成し、データを出力します。
マスタコントローラおよび、各スレーブコントローラで行う必要があります。
ログインレベルはプログラマです。
排他エリアの作成手順
1
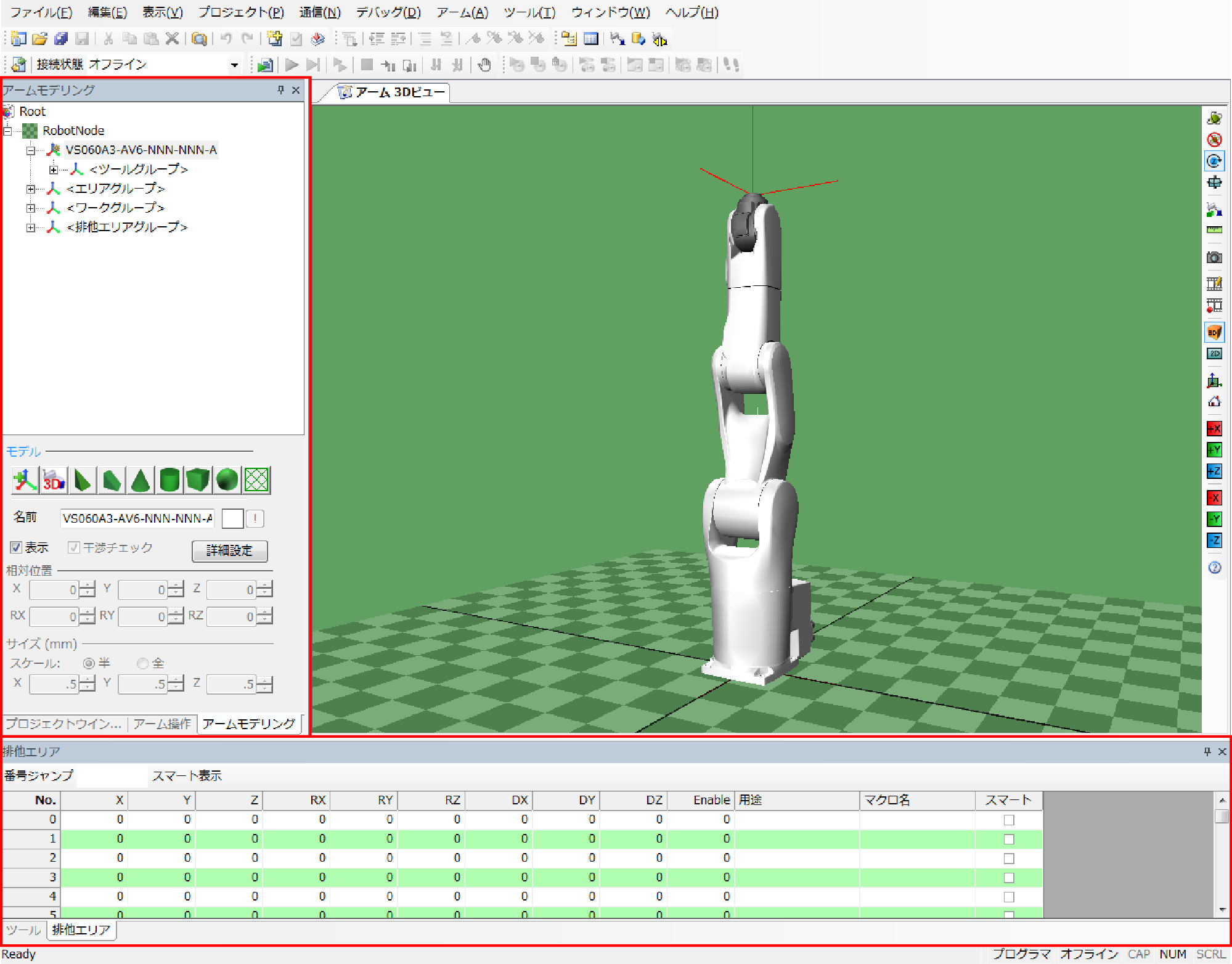
WINCAPSIIIのアームモデリングウィンドウを開き、エリアを作成します。
初めてこの機能を使用するときは、排他エリアウィンドウを開きます。
操作経路:メニュー[表示(V)] – [アーム座標系] – [排他エリア]
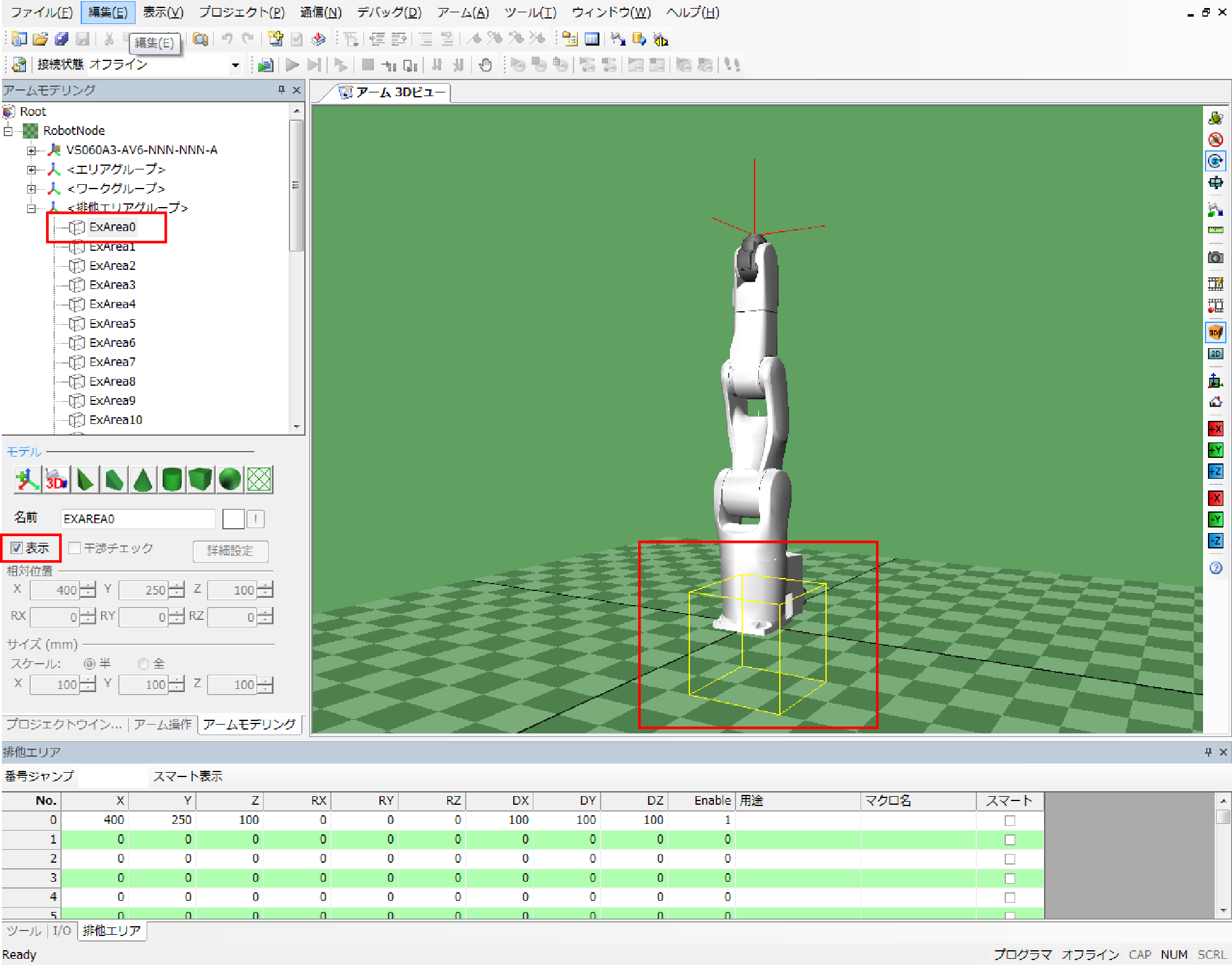
「排他エリア」ウィンドウのノードで排他モデルの位置や大きさを設定します。

| 項目 | 内容 |
|---|---|
| No. | エリア番号 |
| X | 位置X |
| Y | 位置Y |
| Z | 位置Z |
RX |
姿勢X |
| RY | 姿勢Y |
| RZ | 姿勢Z |
| DX | 大きさX |
| DY | 大きさY |
| DZ | 大きさZ |
| Enable | 1:有効 0:無効 |
2
アームモデリングウィンドウで排他エリアの「表示」にチェックを入れると、エリアが表示されます。
3
排他エリアを複数作成する場合は、STEP1からSTEP2を繰り返します。
4
排他エリアのデータを出力します。
メニュー[アーム(A)]の[バーチャルフェンス/排他制御データ出力(V)]を選択します。
処理が完了すると、完了メッセージが表示されるので[OK]ボタンを押します。
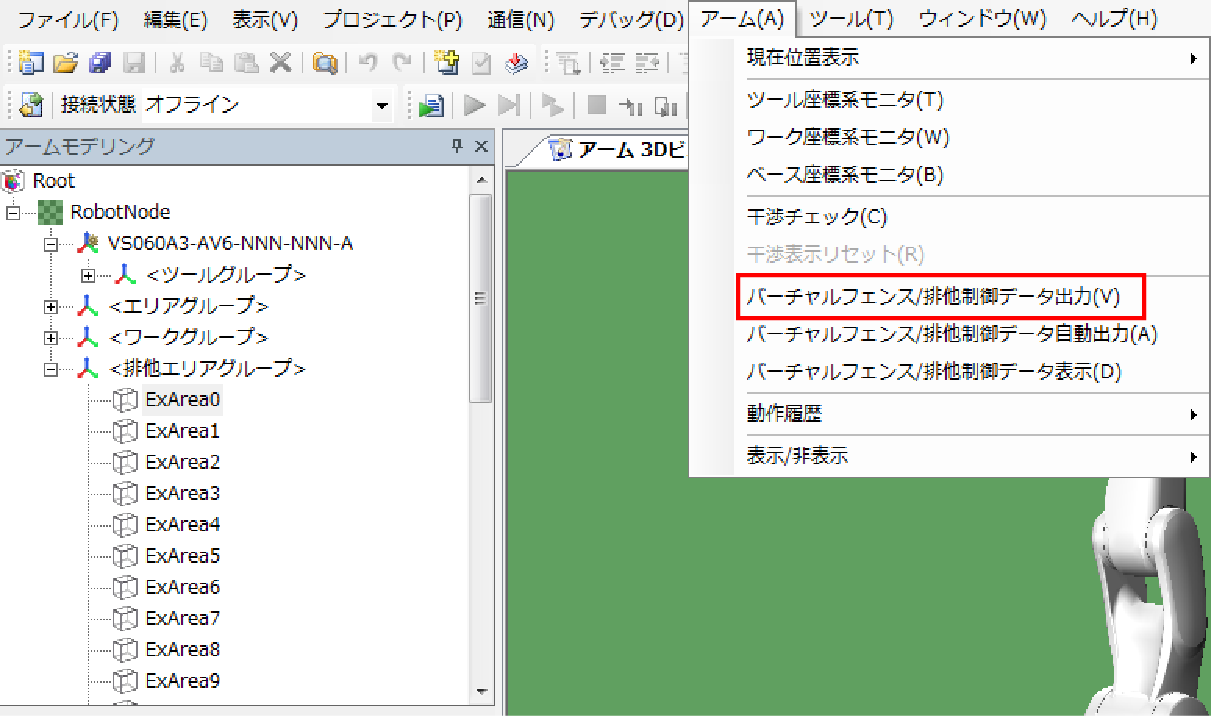
出力した排他制御データを確認したい場合は、メニュー[アーム(A)]の[バーチャルフェンス/排他制御データ表示(D)]で確認することができます。
5
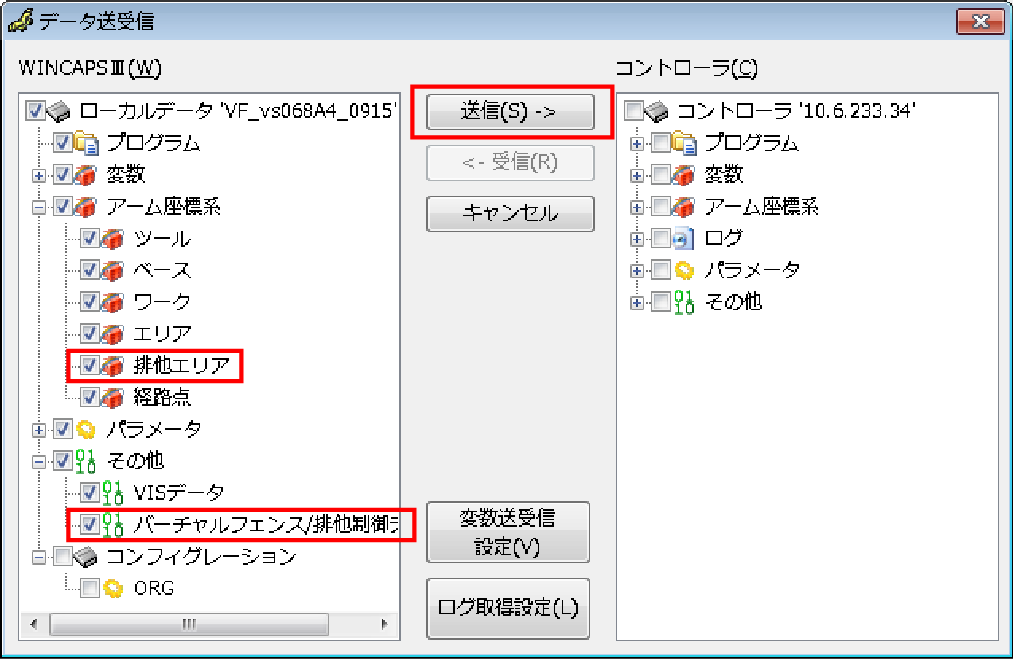
コントローラへ送信します。
「排他エリア」及び「バーチャルフェンス/排他制御データ」にチェックが付いていることを確認して送信してください。
WINCAPSIIIガイドの「通信設定」及び「データの送受信」を参照してください。
データ送信後、コントローラを再起動してください。
この作業を行うには、コントローラとWINCAPSIIIが通信可能になっている必要があります。通信設定の方法については、WINCAPSIIIガイドの「ロボットコントローラとの通信」を参照してください。
USBメモリでもデータの受け渡しができます。詳しくは「USBでのデータの受け渡し」を参照してください。
6
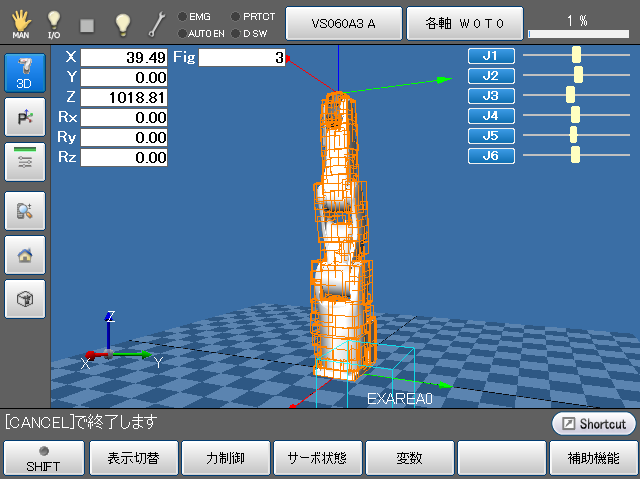
ティーチングペンダントでアーム画面を開きます。
排他制御データを表示するには、表示したい排他制御データの表示設定と、パラメータの「329:排他制御コントローラ設定」を"1:マスタ"または"2:スレーブ"に設定し、コントローラの再起動を行ってください。
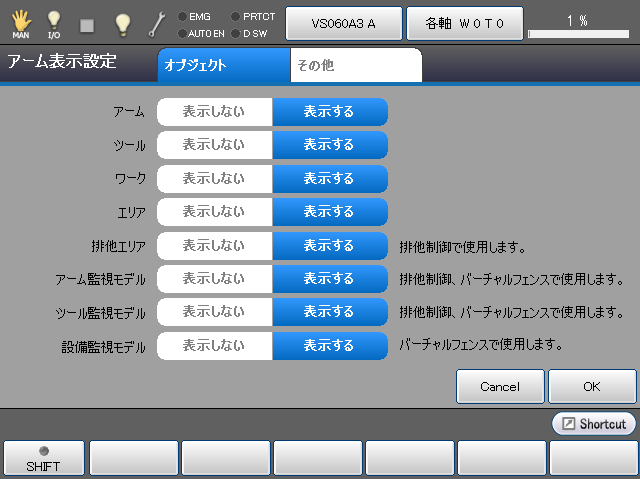
排他制御データの表示/非表示
排他エリアや監視モデルの表示、非表示を設定することができます。
操作経路:基本画面 - [F2 アーム] - [F6 補助機能] - [F7 表示設定]
各項目の「表示しない/表示する」を設定後、[OK]を押します。
ID : 2260
- このページに関連する情報
- USBでのデータの受け渡し