
ID : 4410
データの送受信
ロボットコントローラとの間でデータの送受信を行います。
データ送受信中は、コントローラ電源を切らないでください。
各項目の中にはWINCAPSIIIの設定やロボットコントローラの仕様により、送受信データ一覧に表示されないものがあります。
送信手順
1
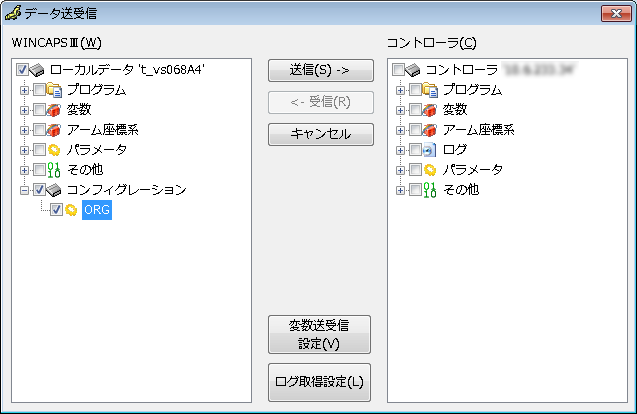
「通信」メニューから「データ送受信」を選択します。
「データ送受信」ダイアログを表示します。
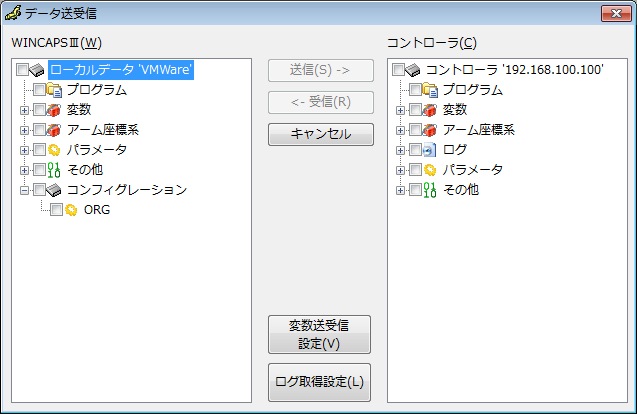
- 変数送受信設定
変数、アーム座標系の送受信対象を選択します。デフォルト(通常)は、値、用途、マクロ名の全てを送受信します。 - ログ取得設定
取得するログデータの領域を選択します。デフォルト(通常)では、エラーログと操作ログは保存用メモリより取得し、その他は作業用メモリより取得します。誤操作防止のため上記の設定値は、その回の送受信でのみ有効となります。次の送受信ではデフォルト値に戻りますので、必要時は毎回設定してください。
2
送受信するデータを選択します。
データを送信する場合は、「WINCAPSIII」側、データを受信する場合は「コントローラ」側のチェックボックスを「ON」にしてください。
同時に複数のデータを選択することができます。
3
「送信」ボタンまたは「受信」ボタンをクリックします。
確認ダイアログが表示されます。
4
「はい」ボタンをクリックします。
データの送受信を開始します。
送受信中は、進捗状況が画面に表示されます。
ロボットコントローラからデータを受信すると、WINCAPSIIIのプロジェクト内のデータが更新されます。プログラムは上書きされるため、プログラムを修正している場合は編集内容が破棄されます。
CALSET値を含むデータ送信方法
アームパラメータの中にはロボット固有の位置データを決める「CALSET値」が含まれています。ロボットコントローラからWINCAPSIIIにアームパラメータを受信する場合はCALSET値が含まれますが、WINCAPSIIIからロボットコントローラにアームパラメータを送信する場合は、書き換えを防ぐためCALSET値は含まれていません。
CALSET値を含めてアームパラメータデータをロボットコントローラに送信したい場合は、以下を行います。
送信準備
WINCAPSIIIのデータの送受信機能でロボットコントローラにアームデータを送信する準備をします。
[ツール]-[オプション]-[通信]タブをクリックします。[送信オプション]内の[送信許可-CALSET値]にチェックを入れ、
[OK]を押します。
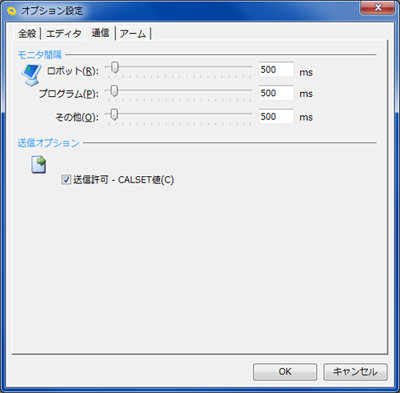
間違ったデータがロボットに送信され、教示位置がずれる恐れがありますので、通常の作業時は[送信オプション]内の[送信許可-CALSET値]のチェックを外してください。
送信手順
WINCAPSIII側の[パラメータ]-[アーム パラメータ]と[コンフィグレーション]-[ORG]にチェックを入れ、通常の送信手順で送信してください。
ID : 4410