
ID : 3374
IAI PCON制御
概要
IAI PCONシリーズをコマンドで制御することができます。この機能はVer.2.7.*から使用可能です。
システム構成
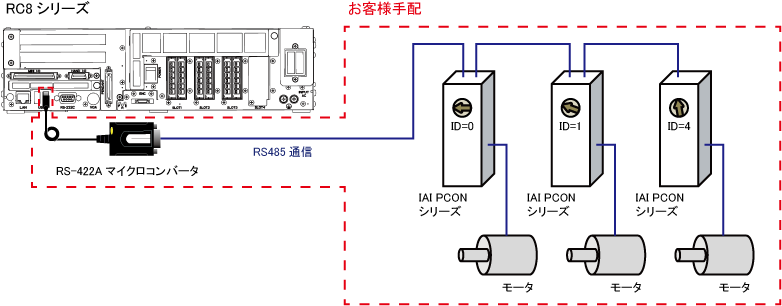
RC8とIAI PCON(以下PCON)はRS485通信で接続します。
RC8にRS-422Aマイクロコンバータを接続することでRS485通信が可能です。RS485ボードでもRS485通信が可能ですが、通信方法が異なりますのでRS485ボードは使用しないでください。
PCONはデイジーチェーンで複数を接続できますが、各々のPCONのIDは重複しないように設定する必要があります。このIDはコマンドを使用する際に各々のPCONを識別するために使用します。
ライセンス
この機能を使用するにはIAI PCONプロバイダライセンスが必要です。
ライセンスキーの入力については、ティーチングペンダント操作ガイドの「機能拡張画面の表示、追加/削除」を参照してください。
コマンドの一覧
コマンドには下表のものがあります。
IAI*の*には制御するPCONの番号を指定します。
| コマンド名 | 機能 | IAI社でのコマンド記号 |
|---|---|---|
| IAI*.ReadAlarmInfo | 最後に発生したアラーム情報を取得します。 | ALAO, ALCO, ALTO |
| IAI*.ReadPositionData | ポジションデータを取得します。 | PCMD, INP, VCMD, ZNMP, ZNLP, ACMD, DCMD, PPOW, LPOW, CTLF |
| IAI*.ReadCurrentPosition | 現在位置を取得します。 | PNOW |
| IAI*.ReadCurrentAlarmCode | 現在発生アラームコードを取得します。 | ALMC |
| IAI*.ReadDSS1 | デバイスステータスレジスタ1の値を取得します。 | DSS1 |
| IAI*.ReadDSS2 | デバイスステータスレジスタ2の値を取得します。 | DSS2 |
| IAI*.ReadDSSE | 拡張デバイスステータスレジスタの値を取得します。 | DSSE |
| IAI*.SwitchServo | サーボをON/OFFします。 | SON |
| IAI*.ResetAlarm | アラームをリセットします。 | ALRS |
| IAI*.Pause | 一時停止の実行と解除をします。 | STP |
| IAI*.Home | 原点復帰します。 | HOME |
| IAI*.SwitchJogInching | ジョグ/インチング動作を切り替えます。 | JISL |
| IAI*.GetCurrentPositionData | ポジションデータを取り込みます。 | TEAC |
| IAI*.JogPlus | 反原点方向へジョグ/インチング動作します。 | JOG+ |
| IAI*.JogMinus | 原点方向へジョグ/インチング動作します。 | JOG- |
| IAI*.SwitchPIOModbus | Modbus指令の有効/無効を切り替えます。 | PMSL |
| IAI*.Stop | 減速停止します。 | STOP |
| IAI*.MovePTP | 数値で指定した移動先へ移動します。 | PCMD, INP, VCMD, ACMD, PPOW, CTLF |
| IAI*.WritePositionData | ポジションデータを書き込みます。 | PCMD, INP, VCMD, ZNMP, ACMD, PPOW, LPOOW, CTLF |
使用例
'!TITLE "IAI Sample:PCON ID=1"
Sub Main
' 警告の解除
IAI1.ResetAlarm False
IAI1.ResetAlarm True
' Modbus指令有効
IAI1.SwitchPIOModbus False
IAI1.SwitchPIOModbus True
' サーボON
IAI1.SwitchServo True
' ホームポジション移動
IAI1.Home False
IAI1.Home True
Delay 3000
' 5.00mm移動
IAI1.MovePTP 500, 10, 1000, 30, 0, 8 '目標位置 500x0.01mm
Delay 1000
' -5.00mm移動
IAI1.MovePTP -500, 10, 1000, 30, 0, 8 '目標位置 -500x0.01mm
Delay 1000
' サーボOFF
IAI1.SwitchServo False
' Modbus指令無効
IAI1.SwitchPIOModbus False
End SubID : 3374