| HUB |
通信速度が1Gbps以上のものをご使用ください。
HUBにWINCAPSIII(PC)以外の機器を接続する場合は、協調機能に影響がないかを、実機にて確認してください。
通信量の多い機器(例 : カメラ)を接続すると、状況によりロボットがエラー停止する場合がありますので、できる限りご使用を避けてください。
|
| Ethernet通信用LANケーブル |
カテゴリ6以上でシールドされたものをご使用ください。
結線方式は、ストレートとクロスのどちらも使用できます。 |
| EtherCAT通信用LANケーブル |
カテゴリ5以上でツイストペアのものをご使用ください。
結線方式は、ストレートとクロスのどちらも使用できます。
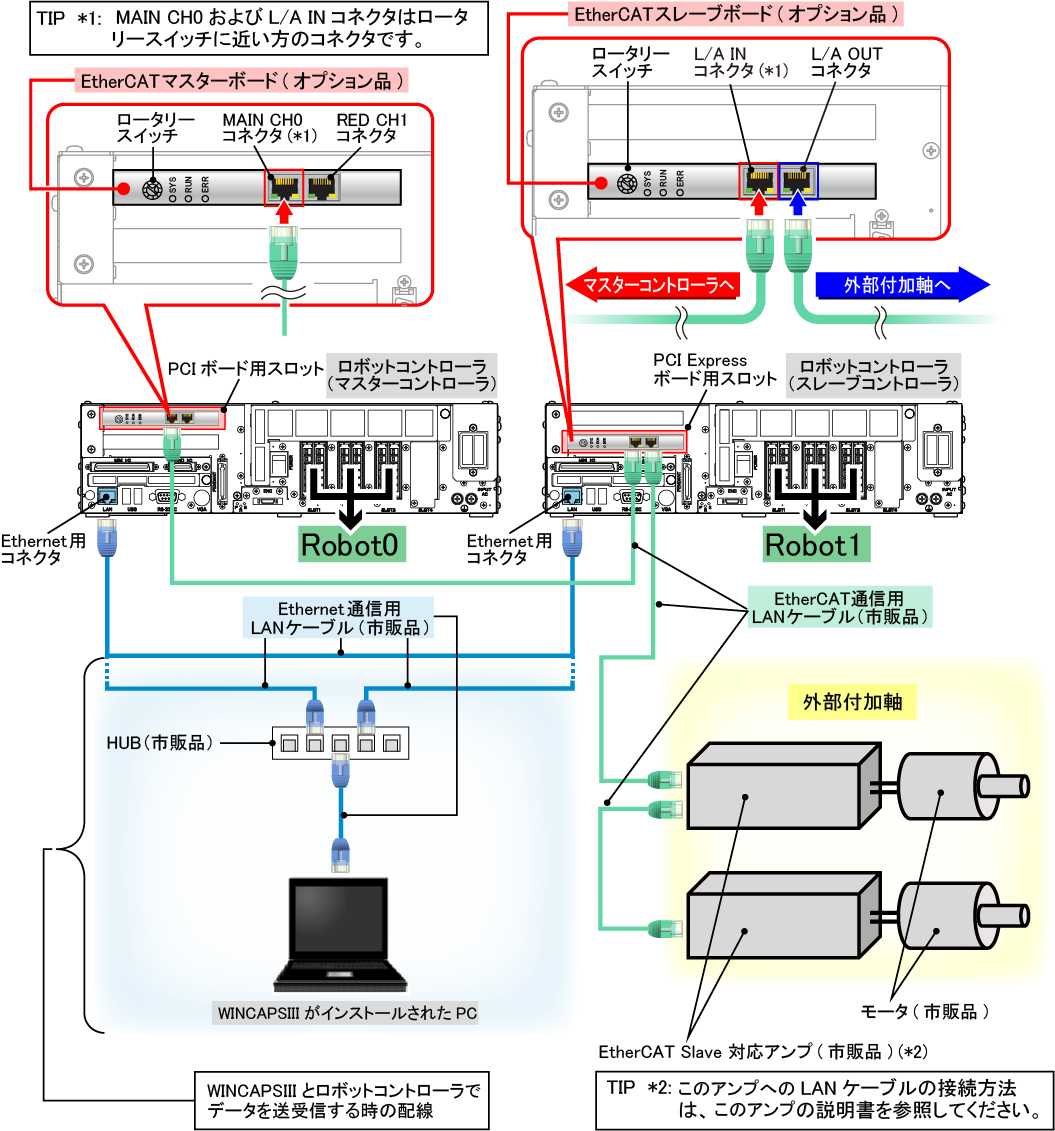
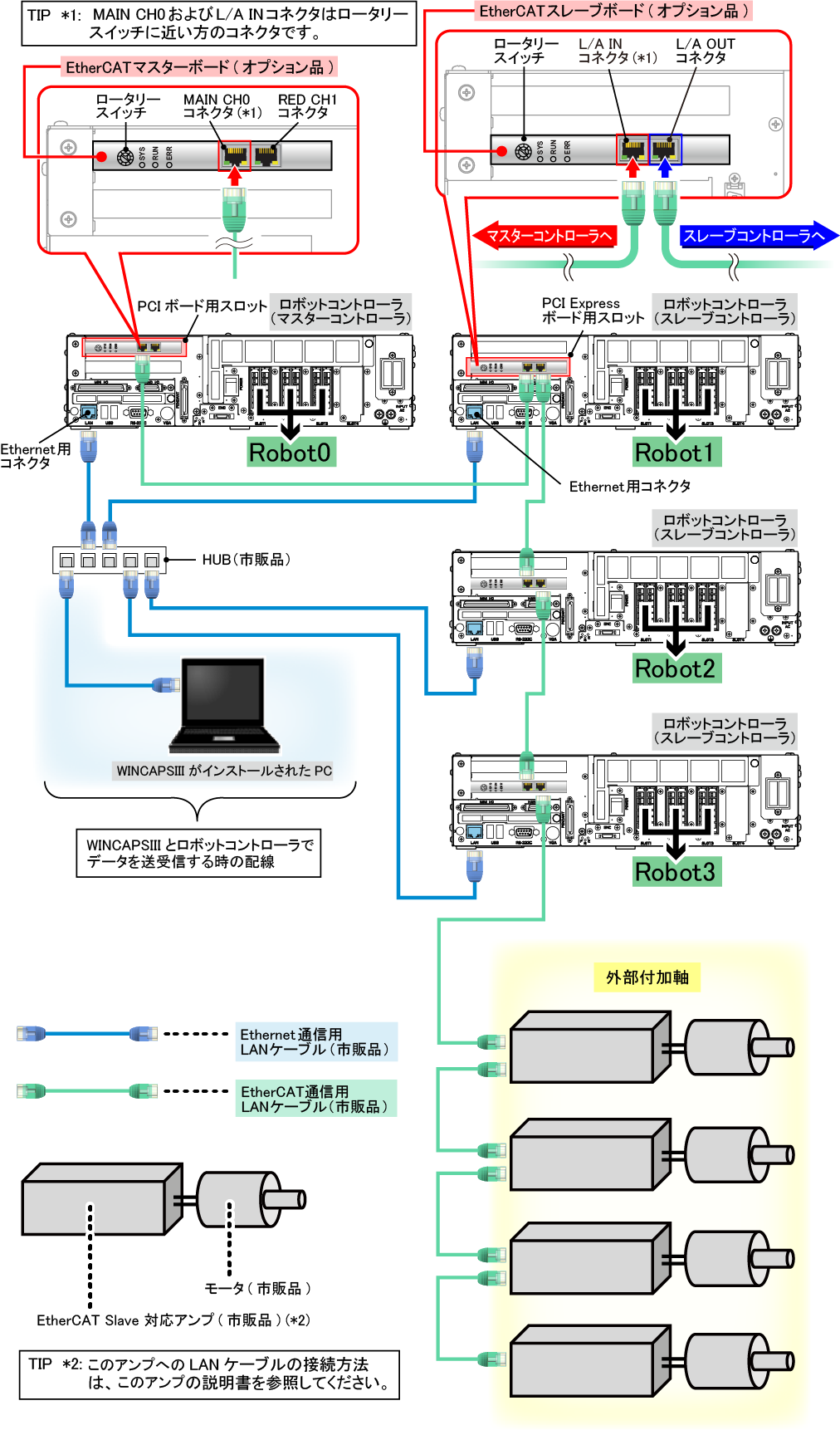
- EtherCATマスターボードおよびEtherCATスレーブボードには、それぞれLANケーブルを接続するコネクタが2つあります。かならず、図に示したコネクタに接続するようにしてください。
- EtherCATマスターボードと接続する機器は、必ずEtherCATスレーブボードにしてください。EtherCATマスターボードと外部付加軸を接続し、外部付加軸からEtherCATスレーブボードをつなげると、正しく動作しません。
- EtherCATマスタボードとEtherCATスレーブボードのステータスは、マスタボードの「LED表示」、スレーブボードの「LED表示」を参照してください。
|
| オプション品 |
- EtherCATマスターボード
-
マスターコントローラには、EtherCATマスターボードと協調機能(マスターコントローラ用)のソフトウェアライセンスの他に、外部付加軸のソフトウェアライセンスも必要です。
ですが、お客様のご利用状況によっては、購入不要なものがあります。例えば、すでに外部付加軸を使用しているロボットコントローラに対して、協調機能も使用できるようにするためには、協調機能(マスターコントローラ用)のソフトウェアライセンスを購入するだけで済みます。
下記表に各製品の品番を示しますので、お客様のご利用状況に応じて、購入製品を選択してください。
-
- 協調機能(マスターコントローラ用)と外部付加軸の両方のソフトウェアライセンスが必要な場合 (以下の中から選択)
|
| 製品 |
品番 |
- EtherCATマスターボード (コントローラに組付出荷)
- 協調機能(マスターコントローラ用)と外部付加軸のソフトウェアライセンスを含む
|
410010-858*と410002-862*を注文 |
- EtherCATマスターボード (ボード単品出荷)
- 協調機能(マスターコントローラ用)と外部付加軸のソフトウェアライセンスを含む
|
410010-859*と410002-863*を注文 |
- 協調機能(マスターコントローラ用)のソフトウェアライセンスのみ
|
410002-775* |
- 外部付加軸のソフトウェアライセンスのみ
|
410002-863* |
- 外部付加軸のソフトウェアライセンスが不要な場合 (以下の中から選択)
|
| 製品 |
品番 |
- EtherCATマスターボード (コントローラに組付出荷)
- 協調機能(マスターコントローラ用)のソフトウェアライセンスを含む
|
410010-858* |
- EtherCATマスターボード (ボード単品出荷)
- 協調機能(マスターコントローラ用)のソフトウェアライセンスを含む
|
410010-859* |
- 協調機能(マスターコントローラ用)のソフトウェアライセンスのみ
|
410002-775* |
- 協調機能(マスターコントローラ用)のソフトウェアライセンスが不要な場合 (以下の中から選択)
|
| 製品 |
品番 |
- EtherCATマスターボード (コントローラに組付出荷)
- 外部付加軸のソフトウェアライセンスを含む
|
410010-848* |
- EtherCATマスターボード (ボード単品出荷)
- 外部付加軸のソフトウェアライセンスを含む
|
410010-849* |
- 外部付加軸のソフトウェアライセンスのみ
|
410002-863* |
|
|
| 製品 |
品番 |
- EtherCATマスターボード (ボード単品出荷)
- ソフトウェアライセンス無し
|
410010-845* |
-
- EtherCATスレーブボード
- 以下の品番から選択してください。
-
| 製品 |
品番 |
- EtherCATスレーブボード (コントローラに組付出荷)
- 協調機能(スレーブコントローラ用)のソフトウェアライセンスはWEBより無償ダウンロード
|
410010-773* |
- EtherCATスレーブボード (ボード単品出荷)
- 協調機能(スレーブコントローラ用)のソフトウェアライセンスはWEBより無償ダウンロード
|
410010-774* |
- 協調機能(スレーブコントローラ用)のソフトウェアライセンスの取得方法は、"オプション機能とライセンス"を参照してください。
- なお、スレーブコントローラには、外部付加軸のソフトウェアラインセンスは不要です。
|
| 外部付加軸 |
- 使用可能なEtherCAT Slave 対応アンプ
-
| メーカー |
製品 |
| 山洋電気 |
SANMOTION R ADVANCED MODEL AC100V 200V仕様
(高速通信仕様 (型番:RS2*****H**)のみ。ただしリニア除く) |
| 安川電機 |
SGD7S EtherCAT AC100V AC200V AC400V仕様
(型番:SGD7S-****A0********)
(ただしリニア、ダイレクトドライブ除く) |
デルタ電子
(Ver.2.5.*から使用可能) |
ASDA-A2-Eシリーズ(型番:ASD-A2-****-E)
(ただしリニア除く) |
Panasonic
(Ver.2.5.*から使用可能) |
- MINUS A5B (型番:M*DH*****B**)シリーズ(M枠を除く)
- MINUS A6BE A6BF (型番:M*DL***BE*** or M*DL***BF***) シリーズ
- MINUS A6BL A6BM (型番:M*DL***BL*** or M*DL***BM***)シリーズ
リニアモータは2.9.*以降から使用可能。ダイレクトドライブは不可
リニアモータを使用する場合、エンコーダのピッチ長1μm以上(例:5μm)で最高速度10m/s以内で使用してください。
この範囲を超える場合は弊社営業にお問い合わせください。
|
HIWIN
(Ver.2.7.*から使用可能) |
- D1シリーズ(EtherCAT対応品)
- D2シリーズ(型番:D2*-****-E-**)
(D1Nシリーズ除く。リニアにも対応)
|
- 注:*には、電源容量、エンコーダ種類等を表す文字が入ります。
-
- 接続可能な外部付加軸の最大数
- ロボットコントローラ1台あたりに対して、接続可能な外部付加軸の最大数が決まっています。
ロボットコントローラに4軸ロボットがつながっている場合は最大4個、6軸ロボットがつながっている場合は最大2個の外部付加軸を接続できます。
例えば、2台のロボットを連動させる場合に、マスターコントローラ、スレーブコントローラともに4軸ロボットがつながっているときは、合計8個の外部付加軸を接続できます。
どの外部付加軸が、マスターコントローラとスレーブコントローラのどちらに割り付くのかは、接続順序によって決まります。詳細は"外部付加軸の接続構成"を参照してください。
|
| WINCAPSIIIとロボットコントローラでデータを送受信する時の配線 |
協調機能のシステム調整時には、WINCAPSIIIと、マスターコントローラおよびスレーブコントローラで、データの送受信を行います。その場合は、WINCAPSIIIがインストールされたPC、マスターコントローラ、スレーブコントローラの全てがつながっている必要があります。そのため、図のように配線します。 |
| その他 |
- マスターコントローラにはEtherCATマスターボードを装着するため、同じPCIボードである、電動ハンドコントロールボードやパラレルI/Oボードは併用できません。CC-LinkリモートデバイスボードなどのPCI Expressボードは併用可能です。
- マスターコントローラにつながるロボットにて電動ハンドを使用したい場合は、"電動ハンドを使用する場合の注意事項"を参照してください。
- スレーブコントローラではフィールドネットワークを使用できません。WINCAPSIIIにて、スレーブコントローラのI/O割付を、MiniI/O専用に設定してください。
|