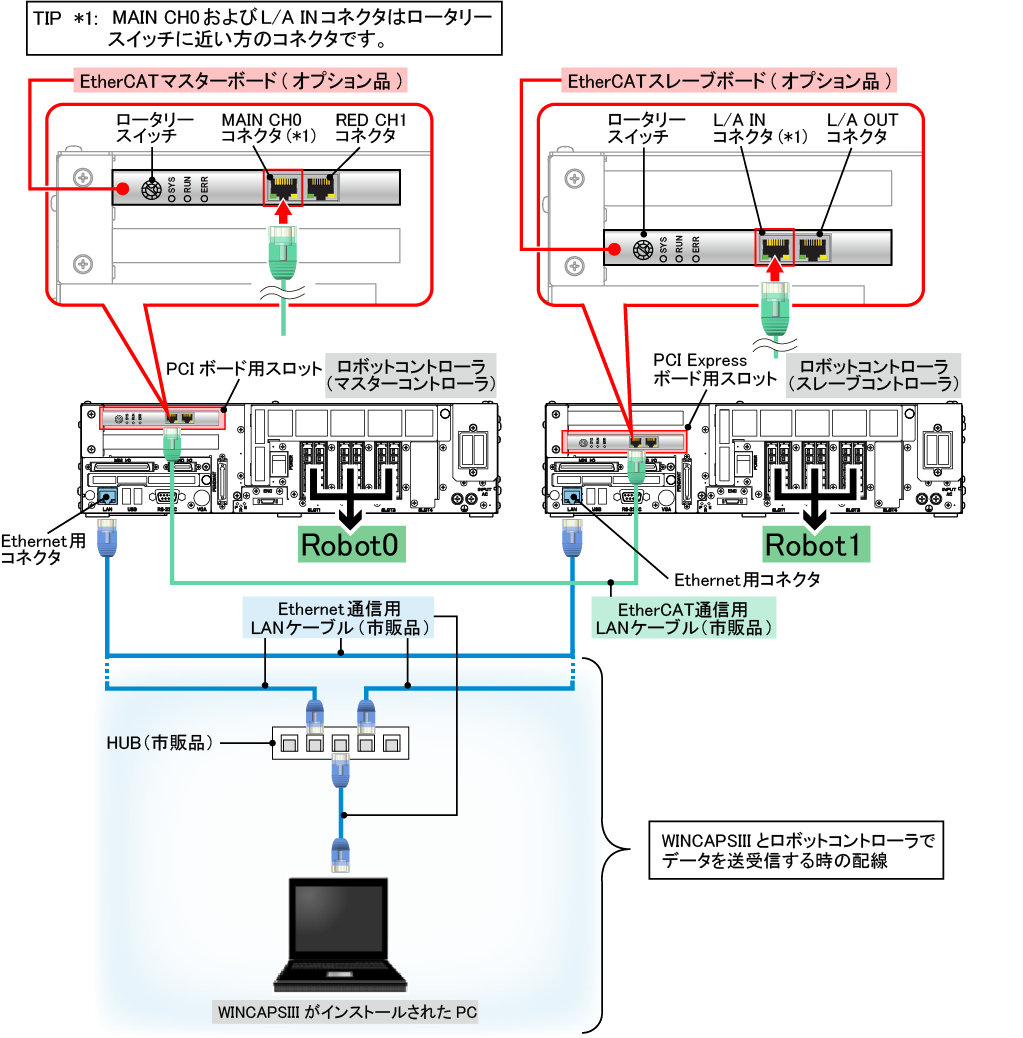
外部付加軸機能を使用しない場合の配線
2台のロボットを連動させるときの配線は下図のようになります。
3台以上のロボットを連動させる場合は、こちらを参照してください。
| HUB |
通信速度が1Gbps以上のものをご使用ください。
HUBにWINCAPSIII(PC)以外の機器を接続する場合は、協調機能に影響がないかを、実機にて確認してください。
通信量の多い機器(例 : カメラ)を接続すると、状況によりロボットがエラー停止する場合がありますので、できる限りご使用を避けてください。
|
| Ethernet通信用LANケーブル |
カテゴリ6以上でシールドされたものをご使用ください。
結線方式は、ストレートとクロスのどちらも使用できます。 |
| EtherCAT通信用LANケーブル |
カテゴリ5以上でツイストペアのものをご使用ください。
結線方式は、ストレートとクロスのどちらも使用できます。
- EtherCATマスターボードおよびEtherCATスレーブボードには、それぞれLANケーブルを接続するコネクタが2つあります。かならず、図に示したコネクタに接続するようにしてください。
- EtherCATマスタボードとEtherCATスレーブボードのステータスは、マスタボードの「LED表示」、スレーブボードの「LED表示」を参照してください。
|
| オプション品 |
- EtherCATマスターボード
-
マスターコントローラには、EtherCATマスターボードと協調機能(マスターコントローラ用)のソフトウェアライセンスが必要です。
ですが、お客様のご利用状況によっては、購入不要なものがあります。例えば、すでに外部付加軸を使用しているロボットコントローラに対して、協調機能も使用できるようにするためには、協調機能(マスターコントローラ用)のソフトウェアライセンスを購入するだけで済みます。
下記表に各製品の品番を示しますので、お客様のご利用状況に応じて、購入製品を選択してください。
-
- EtherCATマスターボードが必要な場合 (以下の中から選択)
|
| 製品 |
品番 |
- EtherCATマスターボード (コントローラに組付出荷)
- 協調機能(マスターコントローラ用)のソフトウェアライセンスを含む
|
410010-858* |
- EtherCATマスターボード (ボード単品出荷)
- 協調機能(マスターコントローラ用)のソフトウェアライセンスを含む
|
410010-859* |
|
|
| 製品 |
品番 |
- 協調機能(マスターコントローラ用)のソフトウェアライセンスのみ
|
410002-775* |
|
|
| 製品 |
品番 |
- EtherCATマスターボード (ボード単品出荷)
- ソフトウェアライセンス無し
|
410010-845* |
-
- EtherCATスレーブボード
- 以下の品番から選択してください。
-
| 製品 |
品番 |
- EtherCATスレーブボード (コントローラに組付出荷)
- 協調機能(スレーブコントローラ用)のソフトウェアライセンスはWEBより無償ダウンロード
|
410010-773* |
- EtherCATスレーブボード (ボード単品出荷)
- 協調機能(スレーブコントローラ用)のソフトウェアライセンスはWEBより無償ダウンロード
|
410010-774* |
- 協調機能(スレーブコントローラ用)のソフトウェアライセンスの取得方法は、"オプション機能とライセンス"を参照してください。
|
| WINCAPSIIIとロボットコントローラでデータを送受信する時の配線 |
協調機能のシステム調整時には、WINCAPSIIIと、マスターコントローラおよびスレーブコントローラで、データの送受信を行います。その場合は、WINCAPSIIIがインストールされたPC、マスターコントローラ、スレーブコントローラの全てがつながっている必要があります。そのため、図のように配線します。 |
| その他 |
- マスターコントローラにはEtherCATマスターボードを装着するため、同じPCIボードである、電動ハンドコントロールボードやパラレルI/Oボードは併用できません。CC-LinkリモートデバイスボードなどのPCI Expressボードは併用可能です。
- マスターコントローラにつながるロボットにて電動ハンドを使用したい場合は、"電動ハンドを使用する場合の注意事項"を参照してください。
- スレーブコントローラではフィールドネットワークを使用できません。WINCAPSIIIにて、スレーブコントローラのI/O割付を、MiniI/O専用に設定してください。
|
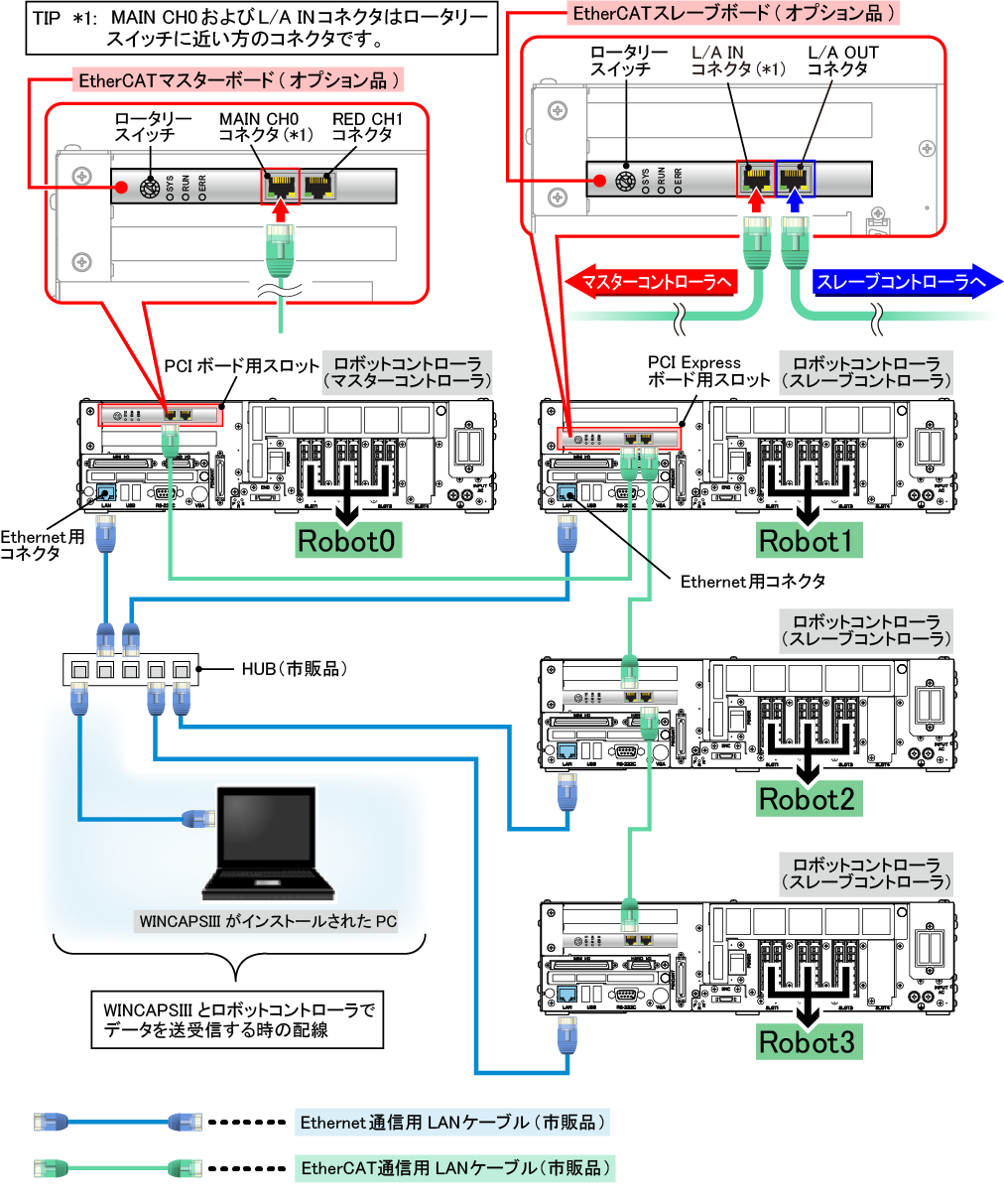
3台以上のロボットを連動させる場合の配線
3台以上のロボットを連動させる場合、スレーブコントローラにつながるロボットには、下図のようにロボット名が割り振られます。
EhterCATの接続順がマスターコントローラに近い方から順に、Robot1、Robot2と割り振られます。
(各構成品の説明内容は、上記表と同じです。)