
ID : 3045
4軸または6軸ロボットの追加設定
対応機種と対応Ver
| ロボットタイプ名 | 対応Ver | ||
|---|---|---|---|
| 4軸スカラロボット | Ver.2.3 | ||
| 4軸XRロボット | Ver.2.5 | ||
| 4軸XYZTロボット | Ver.2.5 | ||
| 4軸XYMZT ロボット | Ver.2.5 | ||
| 6軸タイプAロボット | Ver.2.5 |
概要
4軸ロボットの場合
4軸ロボットで、直動軸にボールねじスプラインシャフトを利用する場合、追加でパラメータを設定する必要があります。
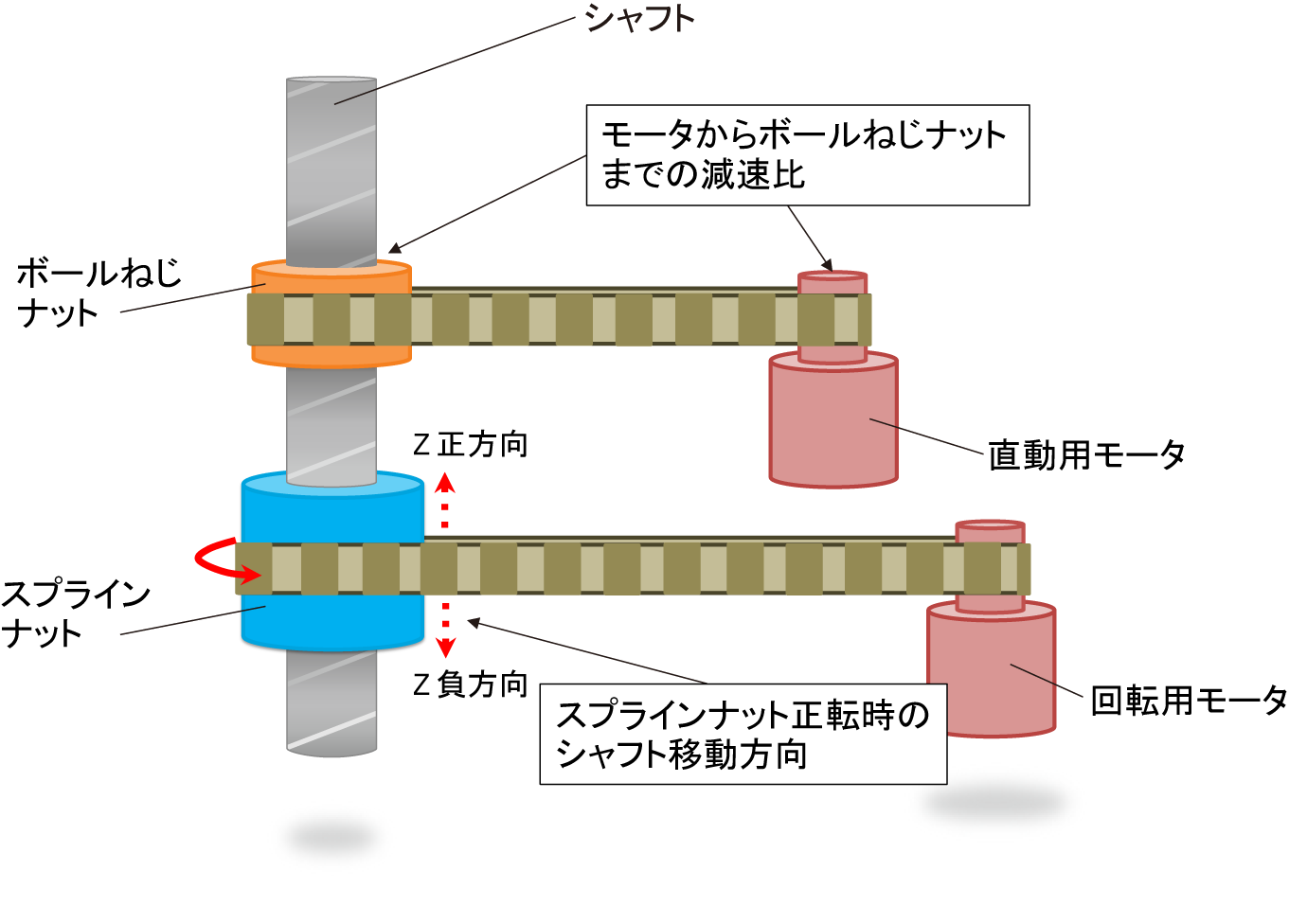
ボールねじスプラインシャフトは、以下の図に示すように「ボールねじナット」と「スプラインナット」と「シャフト」で構成されます。ボールねじナットを回転させるとシャフトは直動動作を行い、スプラインナットを回転させるとシャフトは回転しながら直動動作を行います。
シャフトの回転動作のみ行いたい場合は、ボールねじナットとスプラインナットを同時に回転させます。その際、スプラインナットの回転量に対するボールねじナットの回転量と回転方向を計算するために、以下の2つのパラメータを設定しておく必要があります。
- モータ軸からボールねじナットまでの減速比
- フランジが正回転する方向へスプラインナットを回転させると、シャフトはベース座標Z軸のどちらの方向へ動作するか
6軸ロボットの場合
6軸タイプAロボットの場合、5軸を動作させた際に、その動作量に伴って6軸が動く機構を利用することができます。その場合、以下の二つのパラメータを設定する必要があります。
- 軸干渉前段の減速比
- 5軸正転時の6軸移動方向
設定方法
キネマティクス設定ツールで選択したロボットタイプが追加設定可能なタイプの場合、アーム長設定画面で追加設定項目が表示されます。
4軸ロボットの場合
「ボールねじスプラインシャフト」の項目で「利用する」を選択することで、追加のパラメータを設定できます。一例として4軸スカラロボットの画面を以下に示します。
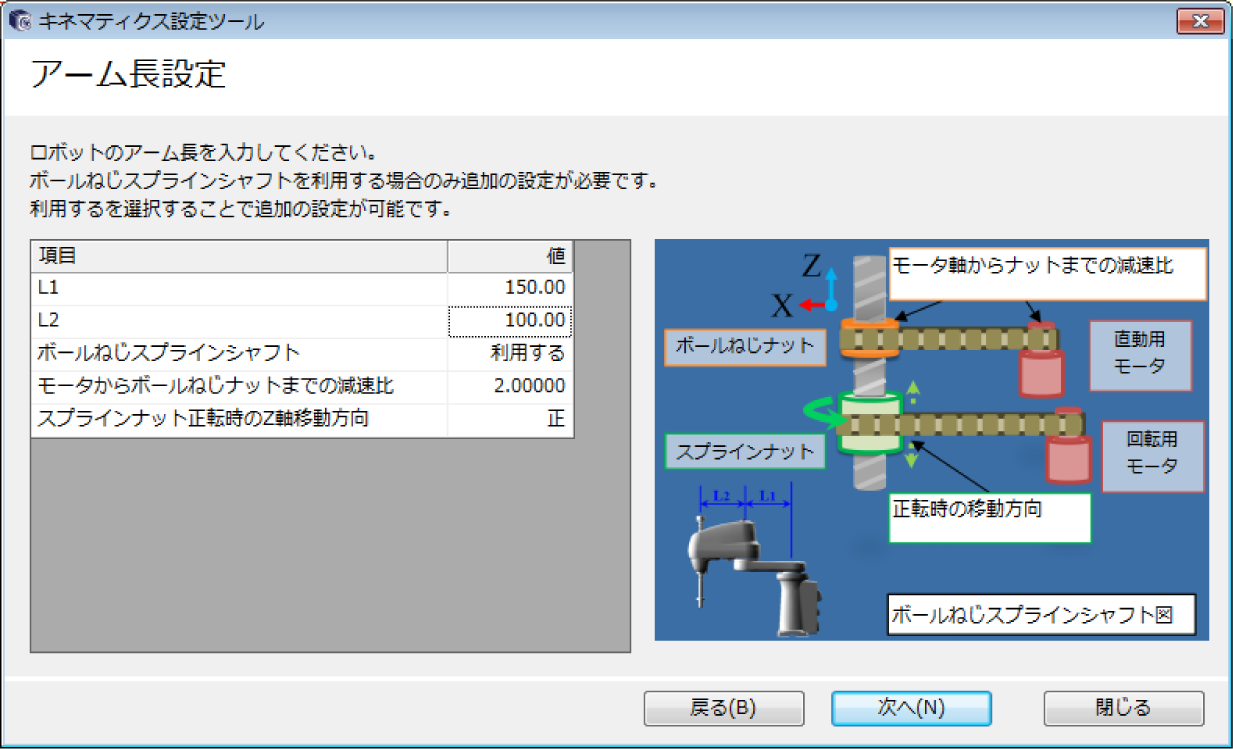
- 「ボールねじスプラインシャフト」を利用する場合のみ、この設定を行ってください。ボールねじスプラインシャフトを利用しない場合に本設定を行うと、ロボットが意図しない動作を行う危険性があります。
- 設計値と異なるパラメータを設定した場合、ロボットが意図しない動作をする危険性があるため、設定には十分注意してください。
6軸ロボットの場合
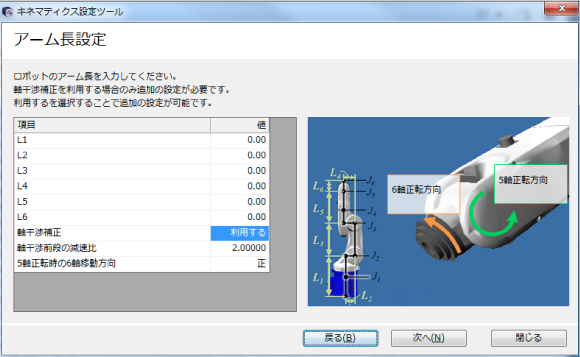
「軸干渉補正」の項目で「利用する」を選択することで、追加のパラメータを設定できます。
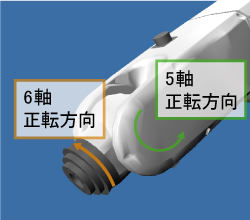
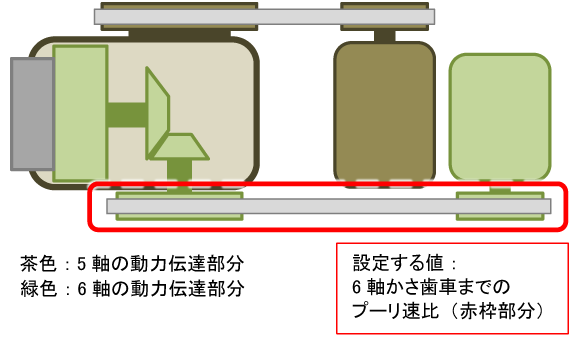
具体例として、6軸の動力伝達にかさ歯車を用いている例を示します。
図の例では、6軸モータがセカンドアーム側にあり、ベルトとかさ歯車と減速機(緑色の部分)を介して6軸の出力軸まで動力が伝わります。この構造では、茶色で示した5軸が動作すると、かさ歯車が接触している部分が倣って6軸モータが回転していなくても6軸が回転してしまいます。軸干渉補正を有効にすることで、5軸の動作に伴った6軸の回転を補正することが可能です。
「軸干渉前段の減速比」には、赤枠で囲まれているプーリの速比を入力してください。「5軸正転時の6軸回転方向」は5軸が正転するのに伴って6軸が正転する場合は「正」、そうでない場合は「負」を設定してください。
- 必要が無い場合には、この設定は行わないでください。例えば、4軸ロボットでボールねじスプラインシャフトを利用しない場合に本設定を行うと、ロボットが意図しない動作を行う危険性があります。
- 設計値と異なるパラメータを設定した場合、ロボットが意図しない動作をする危険性があるため、設定には十分注意してください。
設定値の制限
4軸ロボットの場合
「モータ軸からボールねじナットまでの減速比」には、0より大きい値しか設定できません。
6軸ロボットの場合
「軸干渉前段の減速比」には、0より大きい値しか設定できません。
ID : 3045