
ID : 2849
プロジェクトの作成
キネマティクス設定を使って、ユーザが用意したロボットをMC8シリーズで動作させる場合、キネマティクス設定ツールを使ってWINCAPSIIIのプロジェクトを新規で作成する方法と、既存のプロジェクトを編集する方法があります。
キネマティクス設定ツールはWINCAPSIIIをインストールするときに、一緒にインストールされます。
手順
1
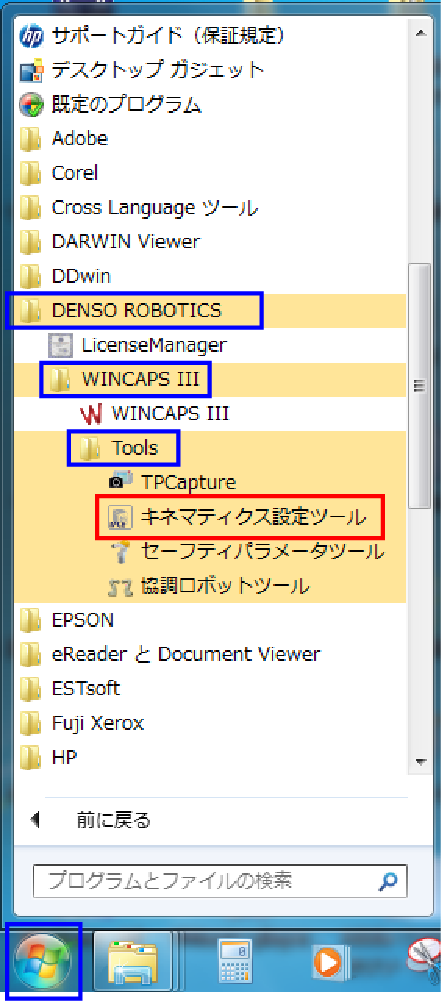
キネマティクス設定ツールを立上げます。
操作経路:PC[スタート]ボタン - [すべてのプログラム] - [DENSO ROBOTICS] - [WINCAPSIII] - [Tools] - [キネマティクス設定ツール]
2
新規でプロジェクトを作成する場合は、[プロジェクトを新規作成する]をチェックし、「名称」と「保存場所」を設定し、[次へ]を押します。
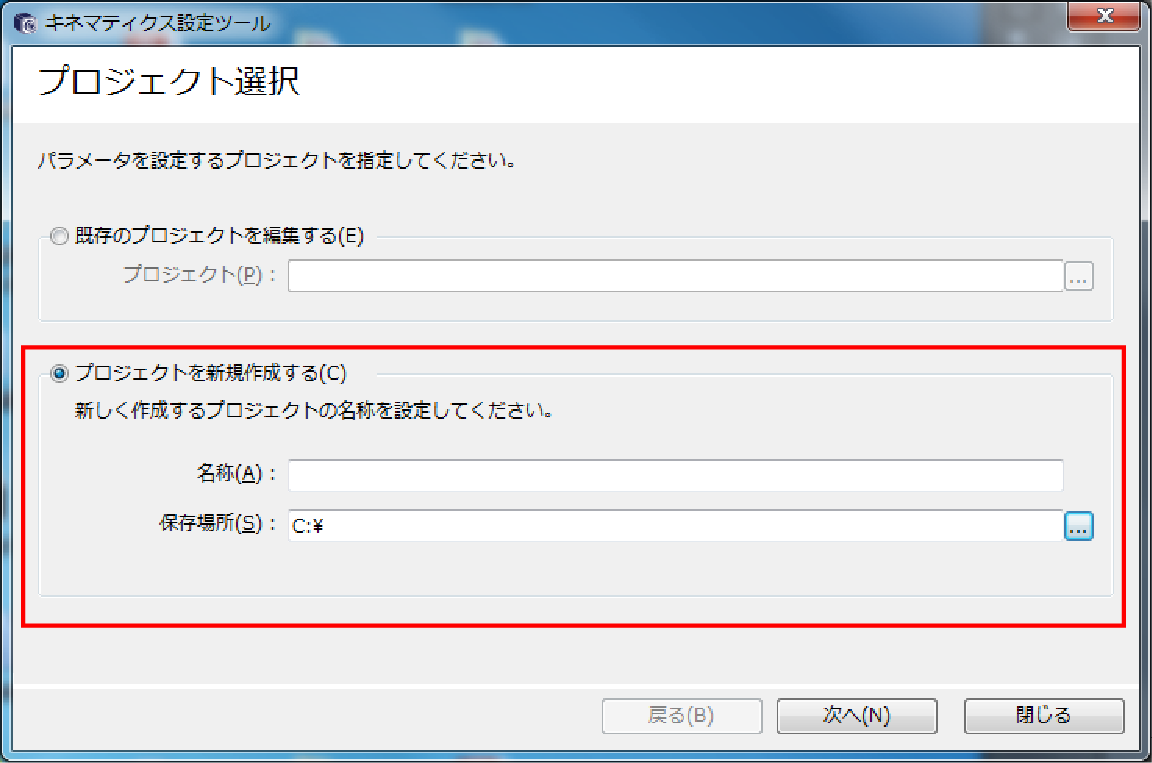
「各軸の設定」の後で、キネマティクス設定ツールを使用する場合は、コントローラのプロジェクトをWINCAPSIIIに取込んで保存した後、このツールで[既存のプロジェクトを編集する]を選択してください。
3
コントローラのタイプを選択し、[次へ]を押します。
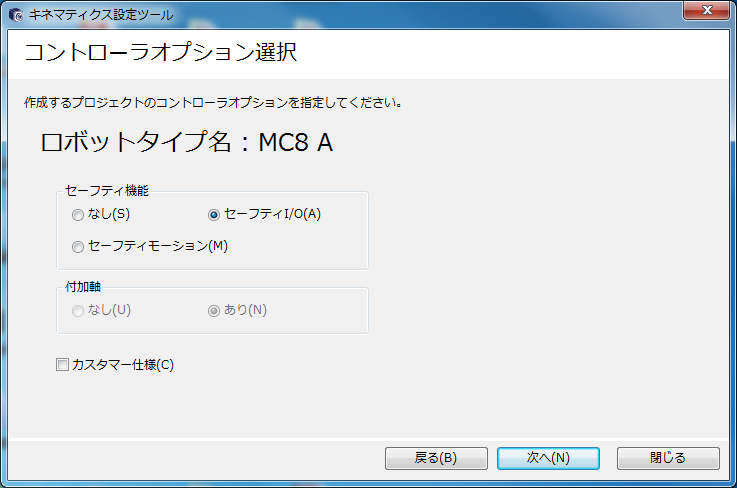
プロジェクトの選択で[既存のプロジェクトを編集する]を選んだ場合、この画面は表示されません。
4
動作させたいロボットの形状を選択し、[次へ]を押します。

選択できるロボットの形状については「ロボットタイプ」を参照してください。
5
選択したロボットタイプに応じてアーム長を設定し、[次へ]を押します。
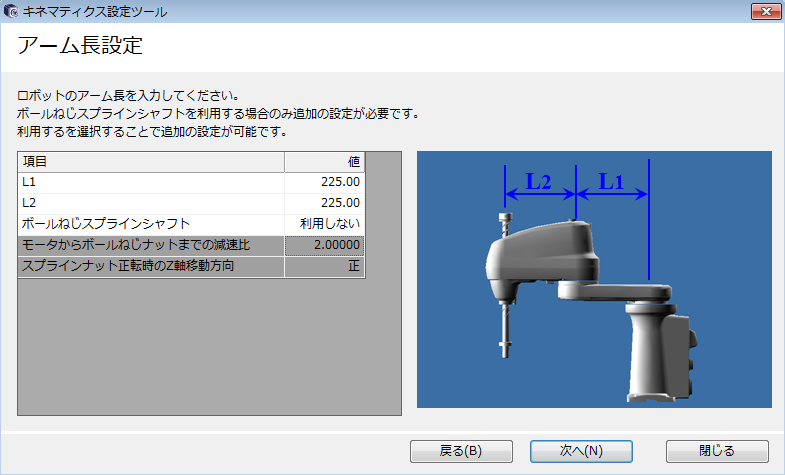
- アーム長として入力する値には制限があります。アーム長の各項目については「アーム長設定」を参照してください。
- 4軸ロボットで直動軸にボールねじスプラインシャフトを利用するか、6軸ロボットで5軸の動作が6軸に干渉する機構を利用する場合は、追加のパラメータ設定が必要です。詳しくは「4軸または6軸ロボットの追加設定」を参照してください。
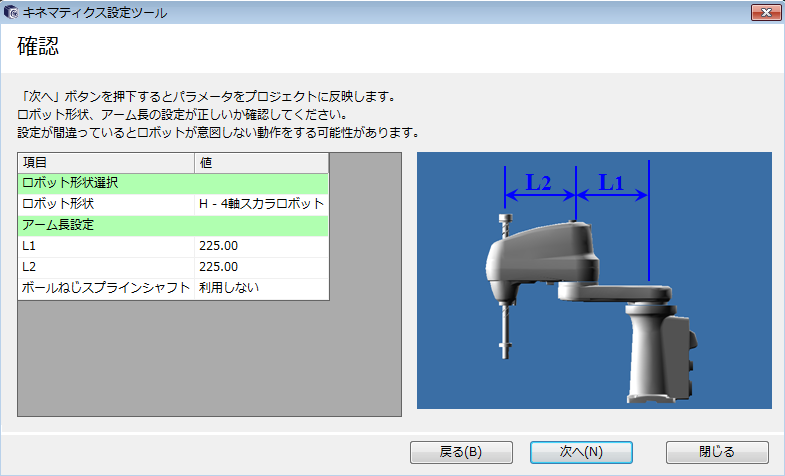
6
確認画面で設定内容を確認し、[次へ]を押します。
設定が間違っているとロボットが意図しない動作をする可能性があります。
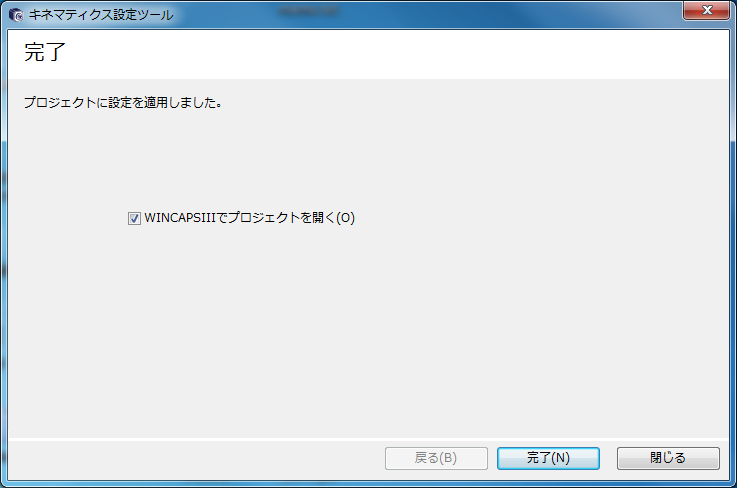
7
[完了]を押し、プロジェクトの作成が終了です。
「WINCAPSIIIでプロジェクトを開く」にチェックをすると、[完了]を押したあとにWINCAPSIIIが立上がります。
ID : 2849
- このページに関連する情報
- アーム長設定
- 4軸または6軸ロボットの追加設定