
ID : 2850
アーム長設定
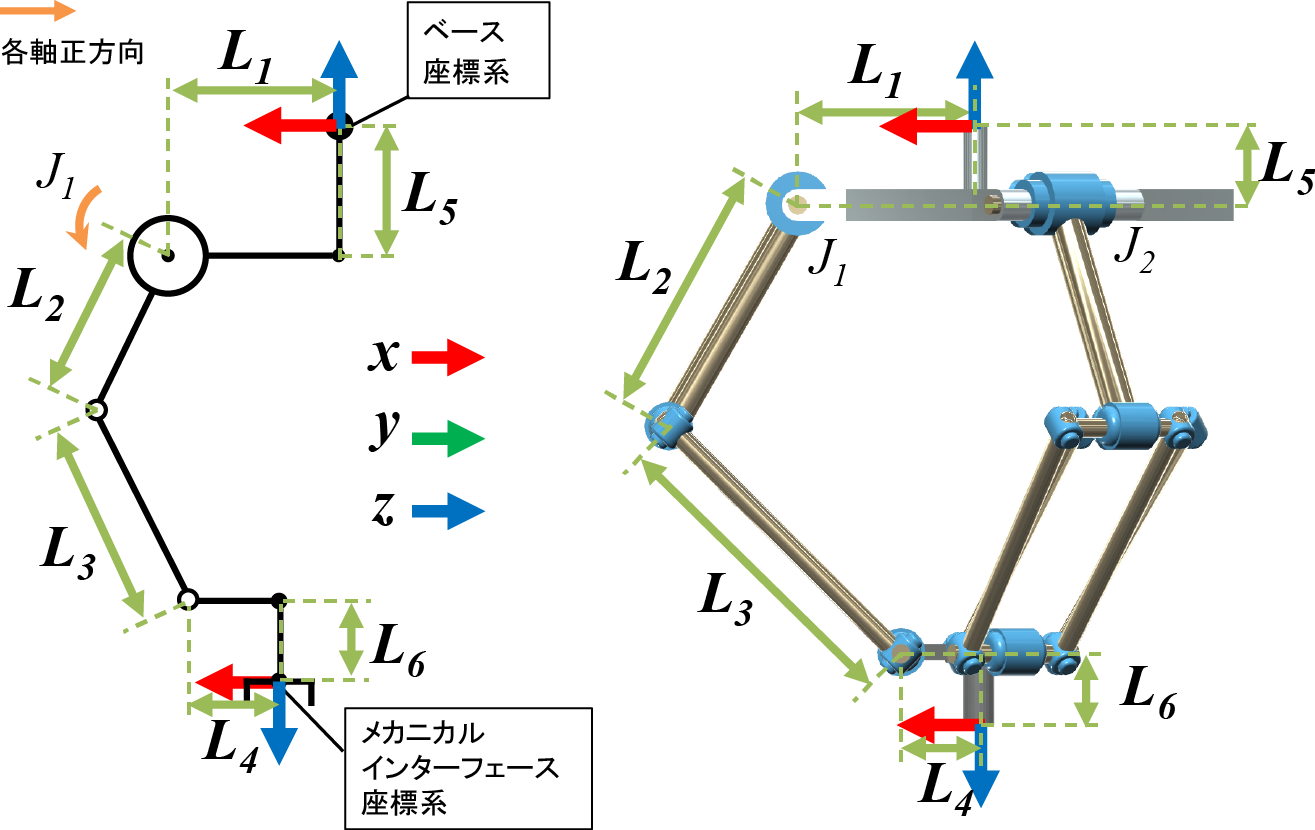
3軸パラレルリンクロボット
図中のL1からL6の長さを入力します。(単位:mm)
| アーム番号 | 説明 | アーム長 |
|---|---|---|
| L1 | ベース座標原点から関節軸中心までの長さ | 0mm以上 |
| L2 | 関節軸中心から肘部分までの長さ | 0mm以上 |
| L3 | 肘部分からフランジ側面までの長さ | 0mm以上 |
| L4 | フランジ側面からフランジ中心までの長さ | 0mm以上 |
| L5 | ベース座標原点から関節軸中心までのZ軸方向のオフセット | 0mm以上 |
| L6 | フランジ面から手先までのZ軸方向の長さ | 0mm以上 |
 |
||
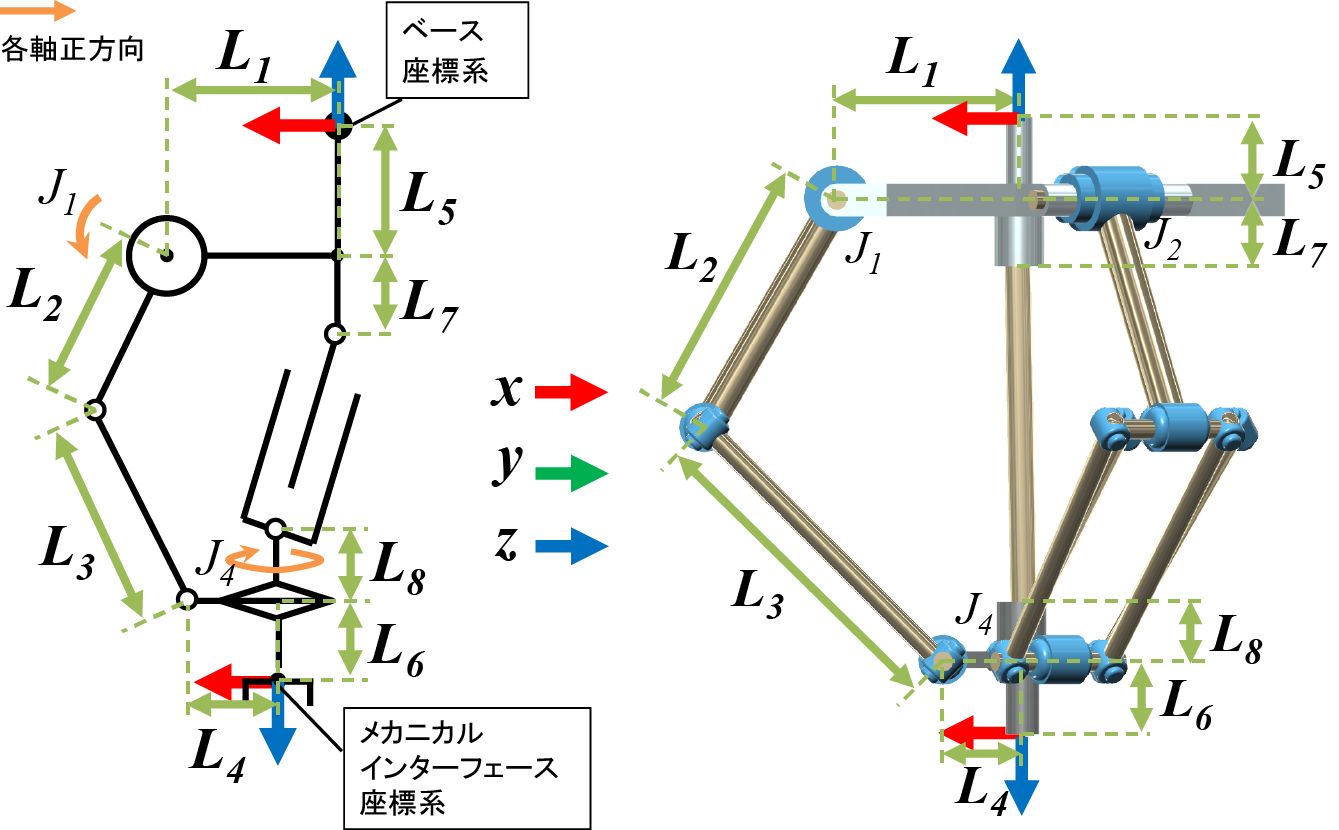
4軸パラレルリンクロボット
上記の3軸パラレルリンクロボットで設定する長さに加えて、L7とL8を入力します。(単位:mm)
| アーム番号 | 説明 | アーム長 |
|---|---|---|
| L7 | 第4軸動力伝達用伸縮部取り付け部の長さ(上側) | 0mm以上 |
| L8 | 第4軸動力伝達用伸縮部取り付け部の長さ(下側) | 0mm以上 |
 |
||
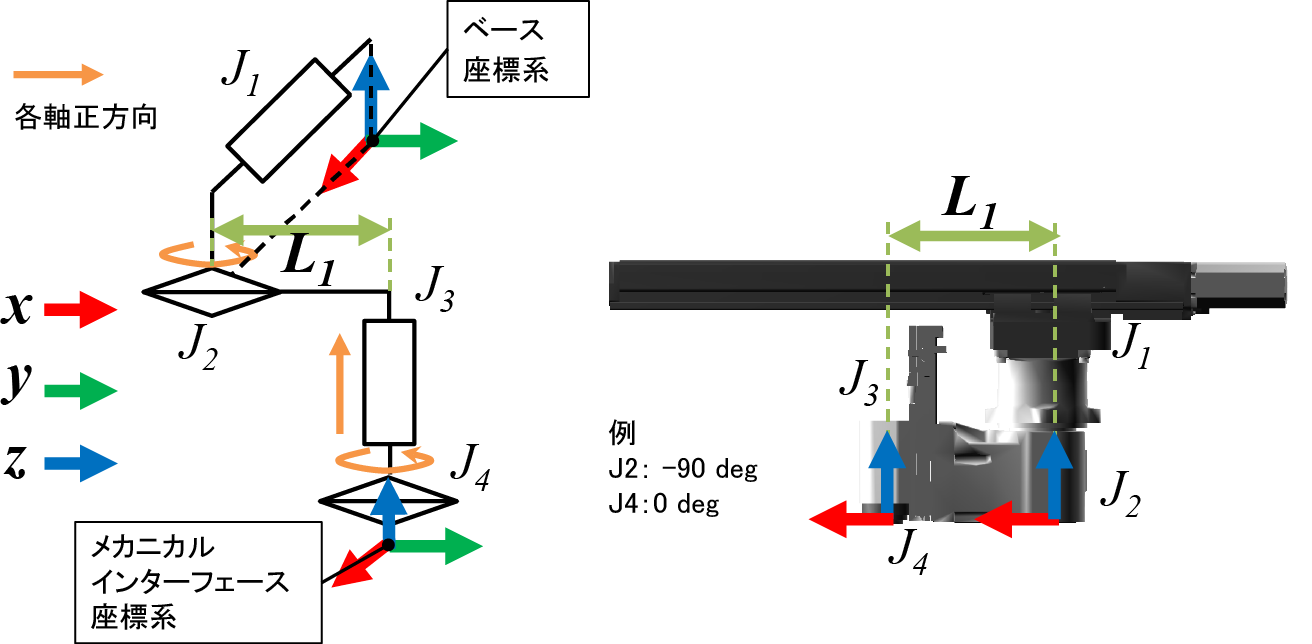
4軸XRロボット
図中のL1に当たる長さを設定します。(単位:mm)
| アーム番号 | 説明 | アーム長 |
|---|---|---|
| L1 | 第2軸回転中心から第4軸回転中心までの長さ | 0mm以上 |
 |
||
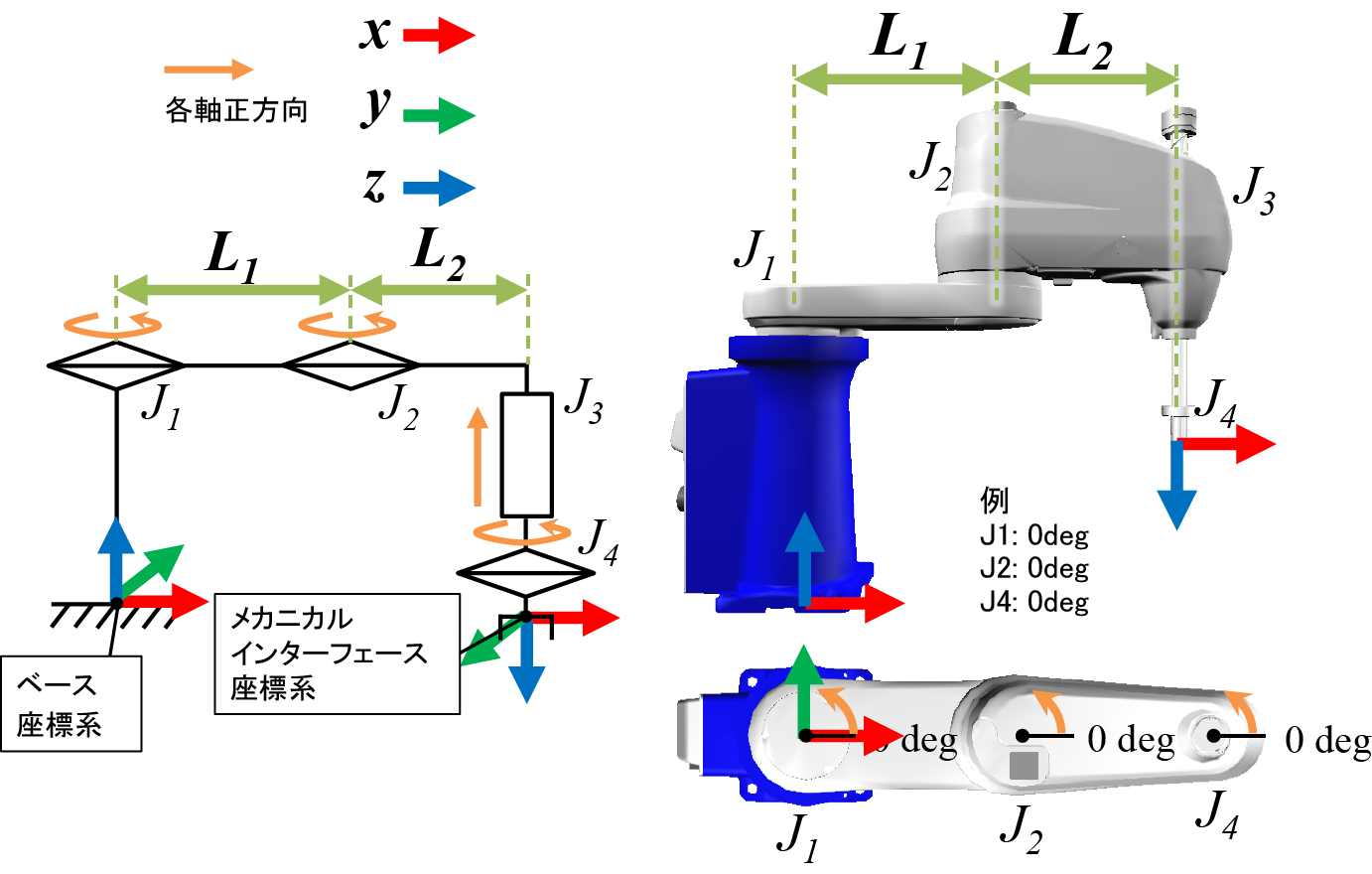
4軸スカラロボット
図中のL1、L2の長さを設定します。(単位:mm)
| アーム番号 | 説明 | アーム長 |
|---|---|---|
| L1 | 第1軸回転中心から第2軸回転中心までの長さ | 0mmより大きい |
| L2 | 第2軸回転中心から第4軸回転中心までの長さ | 0mmより大きい |
 |
||
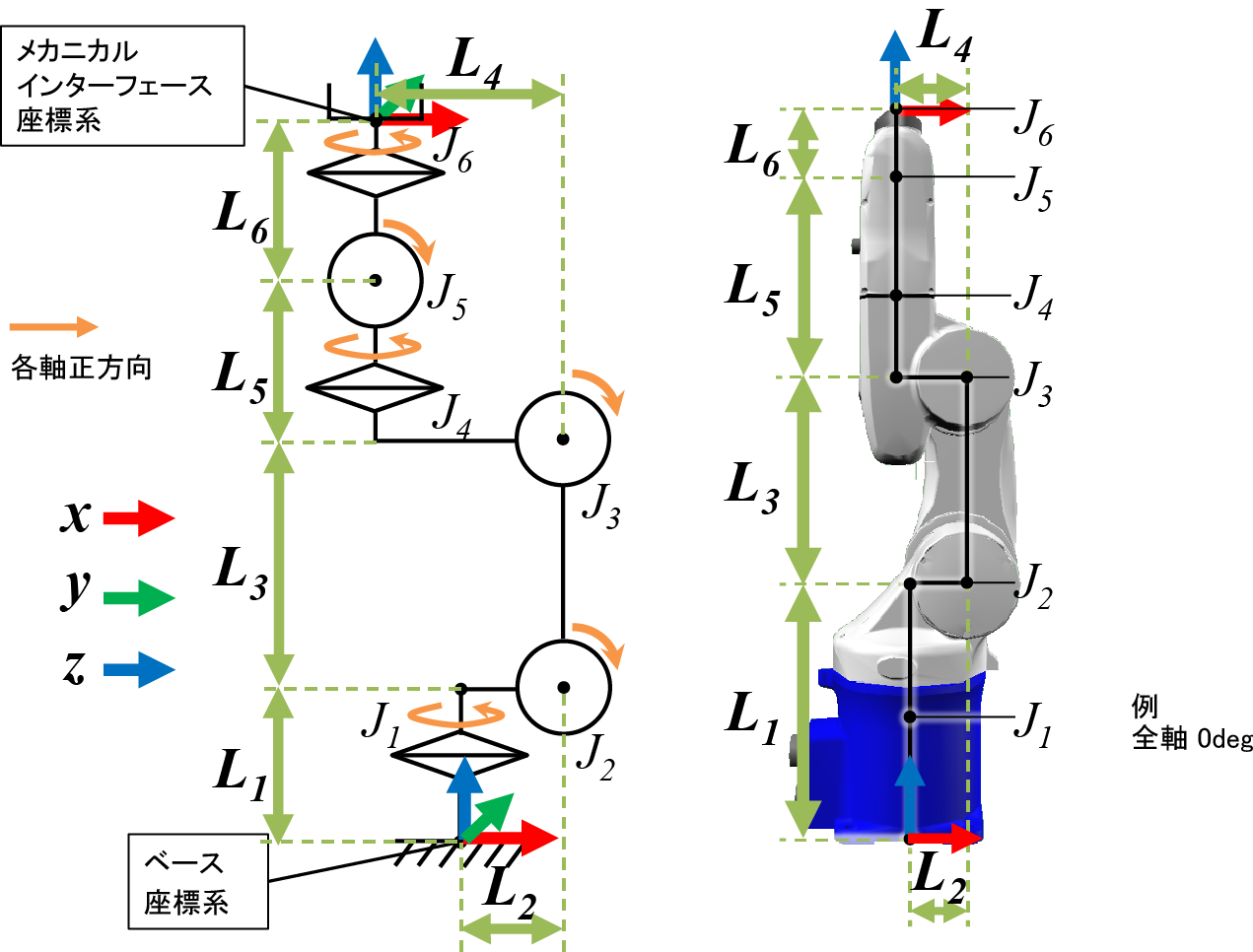
6軸タイプAロボット
図中のL1からL6の長さを入力します。(単位:mm)
| アーム番号 | 説明 | アーム長 |
|---|---|---|
| L1 | ベース座標原点から第2軸中心までのZ軸方向の長さ | 0mm以上 |
| L2 | ベース座標原点から第2軸中心までのX軸方向のオフセット | 0mm以上 |
| L3 | 第2軸中心から第3軸中心までのZ軸方向の長さ | 0mm以上 |
| L4 | 第3軸中心から第4軸中心までのX軸方向のオフセット | 0mm以上 |
| L5 | 第3軸中心から第5軸中心までのZ軸方向の長さ | 0mm以上 |
| L6 | 第5軸中心からフランジ面までのZ軸方向の長さ | 0mm以上 |
 |
||
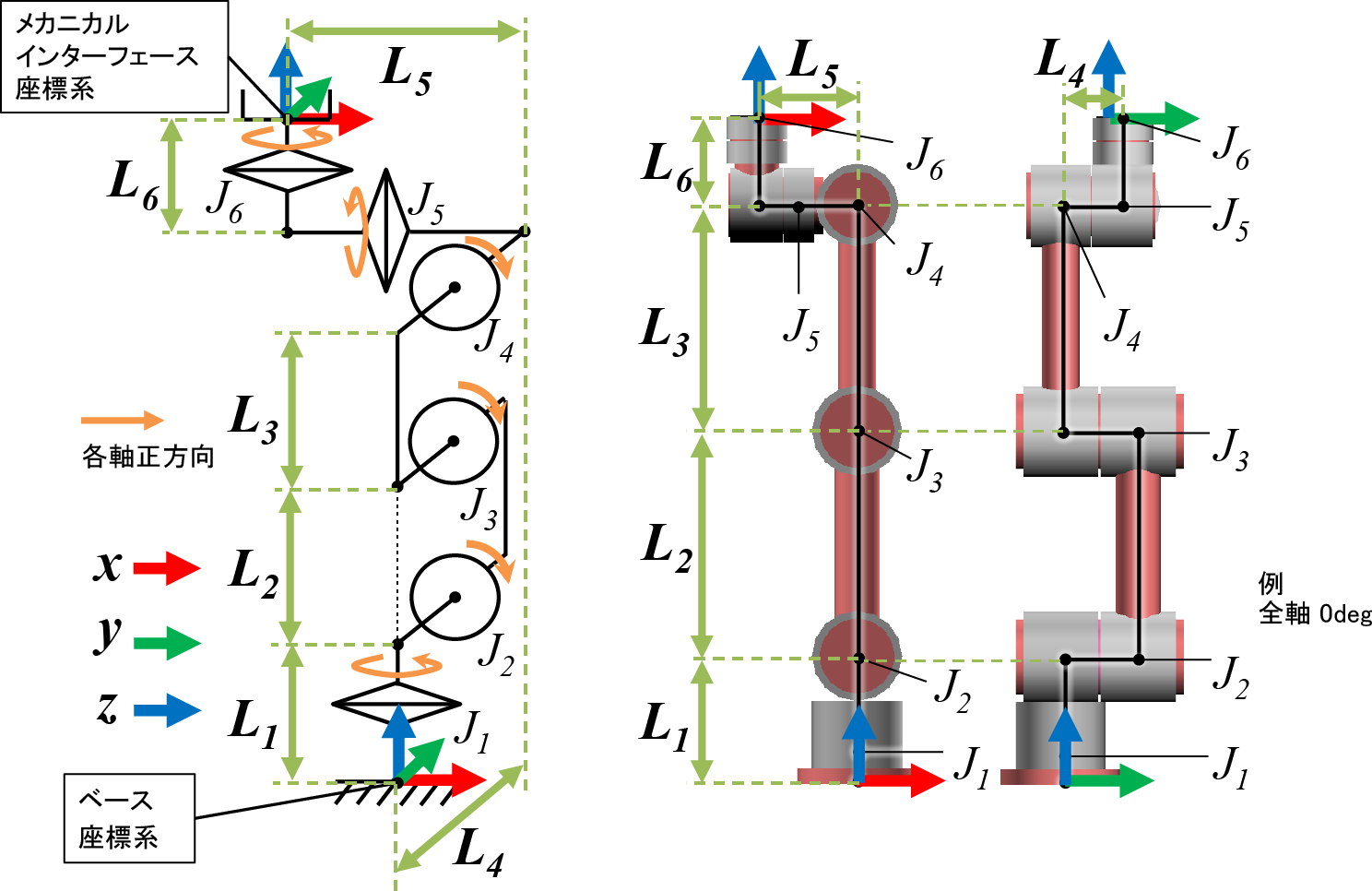
6軸タイプBロボット
図中のL1からL6の長さを入力します。(単位:mm)
| アーム番号 | 説明 | アーム長 |
|---|---|---|
| L1 | ベース座標原点から第2軸中心までのZ軸方向の長さ | 0mm以上 |
| L2 | 第2軸中心から第3軸中心までのZ軸方向の長さ | 0mm以上 |
| L3 | 第3軸中心から第4軸中心までのZ軸方向の長さ | 0mm以上 |
| L4 | ベース座標原点から第5軸中心までのY軸方向のオフセット | 0mm以上 |
| L5 | ベース座標原点から第6軸中心までのX軸方向のオフセット | 0mm以上 |
| L6 | 第4軸中心から第6軸中心までのZ軸方向の長さ | 0mm以上 |
 |
||
ID : 2850