
ID : 2609
基準位置確認
機能
セーフティモーションが現在認識している位置の値と、あらかじめセーフティモーションに登録している基準位置の値が一致していることを確認する機能です。
基準位置確認入力をOFF(解放)すると、基準位置が一致しているかを確認します。一致している場合、基準位置確認出力がONになり、正しく監視できている状態です。
基準位置確認出力がOFFの場合、正しく監視できていません。
使用条件
| 入力信号 | 基準位置確認入力 |
|---|---|
| 出力信号 | 基準位置確認出力 |
| 監視対象 | - |
| 監視範囲設定 | なし |
| 実行モード | 手動モード |
| 機能開始のタイミング | 基準位置確認入力がOFF(解放)になったとき |
基準位置確認の手順
1.基準位置の登録
基準位置の登録手順を説明します。
初回起動時に基準位置確認入力がOFF(解放)の場合エラーが出ます。「基準位置の登録」を行い、コントローラを再起動してください。
1
ロボットを、各軸の角度が分かっている位置・姿勢にします。(例えば全軸0度)
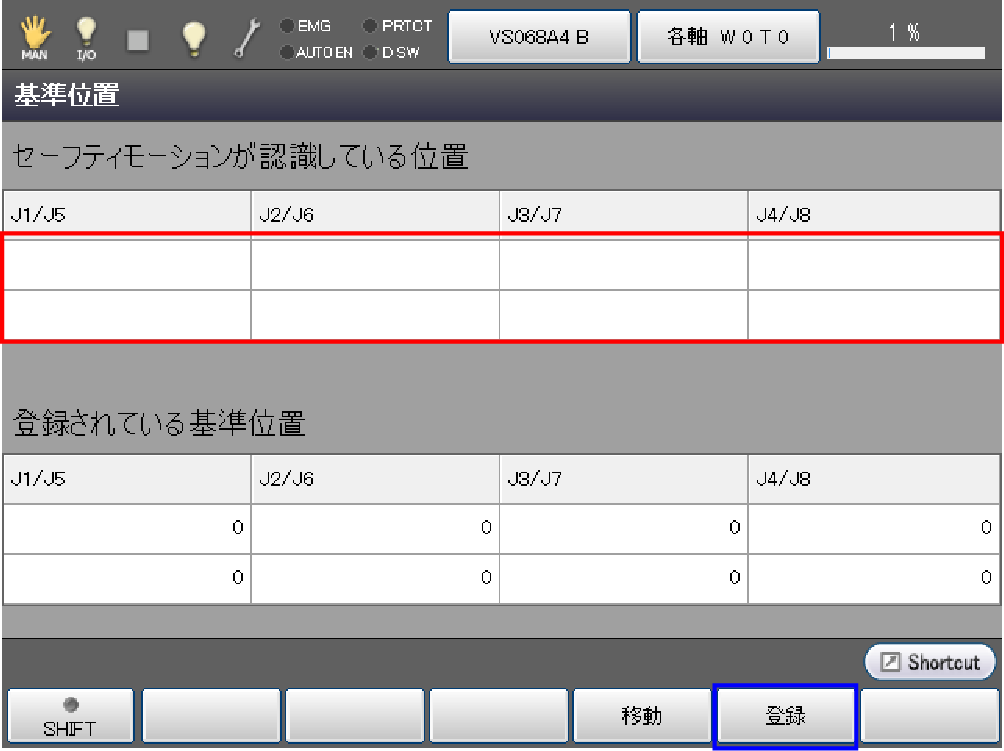
ティーチングペンダントで、セーフティモーションの基準位置画面を開きます。下図の赤枠部分に表示される値が、セーフティモーションが認識している位置です。その値が正しいかを確認します。
操作手順:[F2 アーム] - [F12 保守] - [F5 セーフティモーション] - [F2 基準位置]
2
ユーザが決めた基準位置へロボットを移動します。
STEP1の位置を基準位置にするのが望ましいです。ただし、基準位置の確認は設備化後も行うことがあるため、設備化後も移動が可能な位置にしてください。
3
ティーチングペンダントの[登録]ボタンを押します。セーフティモーションが認識している位置が基準位置として登録されます。
4
コントローラに登録した基準位置のデータをWINCAPSIIIで受信し、保存します。
WINCAPSIIIで受信するときは、「その他」の「監視領域データ」にチェックを入れてください。詳しい手順はWINCAPSIIIガイドの「データの送受信」を参照してください。
5
RC8Aセーフティパラメータツールを立上げ、基準位置データをセーフティモーションへ送信します。
保存したプロジェクトをRC8Aセーフティパラメータツールで開くときに、基準位置データも一緒に読み込まれ、監視モデル送信時に一緒にセーフティモーションへ送信されます。詳しい手順は「監視データの送信」を参照してください。
2.基準位置の確認
セーフティモーションが現在認識している位置の値と、あらかじめセーフティモーションに登録している基準位置の値が一致しているかを確認する手順を説明します。
1
ロボットを基準位置へ動かします。
手動モードで行う場合は、上記のセーフティモーションの基準位置画面で、ティーチングペンダントの[移動]ボタンを押します。
プログラムで行う場合は、SafetyInfoコマンドで基準位置(インデックス番号:7)の値を取得して、その位置に移動するプログラムを組みます。
2
外部機器より基準位置確認入力をOFF(解放)します。
セーフティモーションが現在認識している位置の値と、あらかじめセーフティモーションに登録している基準位置の値が一致すると基準位置確認出力がONになります。
基準位置確認出力について
基準位置確認出力がONの間は正しく監視ができている状態です。
コントローラ電源をOFFして再度電源をONした場合、この出力も再度ONになります。
- 電源OFF時に各軸角度を保存しています。保存に失敗した場合は、次回の電源投入時にエラー0x834A0021「基準位置確認出力をOFFしました」が発生しますので、再度、「基準位置の確認」を行ってからロボットを動かすようにしてください。
- コントローラ電源をOFFした状態でロボットの位置を変更した場合は、再度電源をONしたときにエラーがでて、出力はONしません。再度「基準位置の確認」をしてください。
- CALSETした場合は、エラーがでて、この出力はOFFします。
CALSET後のパラメータをセーフティモーションに反映し、「基準位置の確認」をする必要があります。
以下の手順にしたがって、「基準位置の確認」をしてください。1. WINCAPSIIIでロボットコントローラの全てのデータを受信し、WINCAPSIIIのプロジェクトデータを保存する(WINCAPSIIIガイドの「データの送受信」を参照してください)。
2. 手順1で保存したWINCAPSIIIのプロジェクトデータをRC8Aセーフティパラメータツールで開き、ロボットコントローラに"監視に必要なデータ"を送信する(「監視データの送信」を参照してください)。
3. ロボットコントローラを再起動する。
4. 「基準位置の確認」を行う。
ID : 2609