
ID : 2611
基準位置確認出力
機能
セーフティモーションが現在認識している位置の値と、あらかじめセーフティモーションに登録している基準位置の値が一致している場合に出力します。(2系統)
OFFになっていると監視が正しく行われていない可能性があります。
端子番号
| 信号名 | 端子番号 |
|---|---|
| 基準位置確認出力(系統1) | MotionI/O OutputのNo.13、47 |
| 基準位置確認出力(系統2) | MotionI/O OutputのNo.27、61 |
使用方法
基準位置の状態確認に使用します。
ON条件
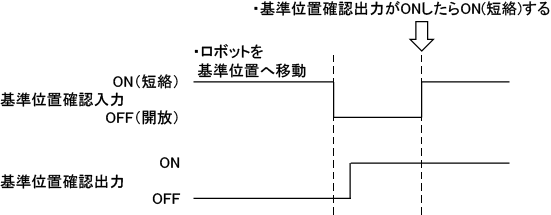
ロボットを基準位置に移動し、基準位置確認入力をOFF(解放)したときに、セーフティモーションが現在認識している位置の値と、あらかじめセーフティモーションに登録している基準位置の値が一致した場合にONします。
OFF条件
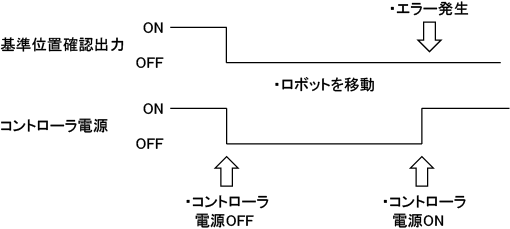
- コントローラ電源をOFF中にロボットを移動させた場合、電源をONした際にエラーが出てOFFします。
- CALSETで基準位置が変更されたとき、エラーが出てOFFします。
状態図
基準位置確認入力の動き
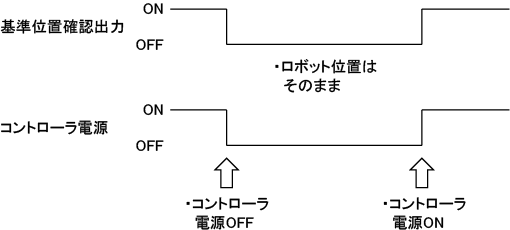
コントローラ起動時に、基準位置確認出力がONを保つ例
コントローラ起動時に、基準位置確認出力がOFFでエラーが出る例
ID : 2611