
ID : 2489
監視データの送信
WINCAPSIIIとRC8Aセーフティパラメータツールを使って、監視に必要なデータをコントローラとセーフティモーションに送信します。
以下に手順を示します。
送信前の準備
WINCAPSIIIがインストールされたPC(以降"インストール済みPC")とロボットコントローラをEthernetケーブルで接続します("LANの接続"参照)。 その際、インストール済みPCとロボットコントローラが、一対一となるように接続してください。

HUBを使用して、他の機器とすでに接続している場合は、一旦、インストール済みPCとロボットコントローラが一対一となるように接続し直します。その状態で監視データを送信した後、ほかの機器との接続を元に戻してください。
HUBを使用している場合の例
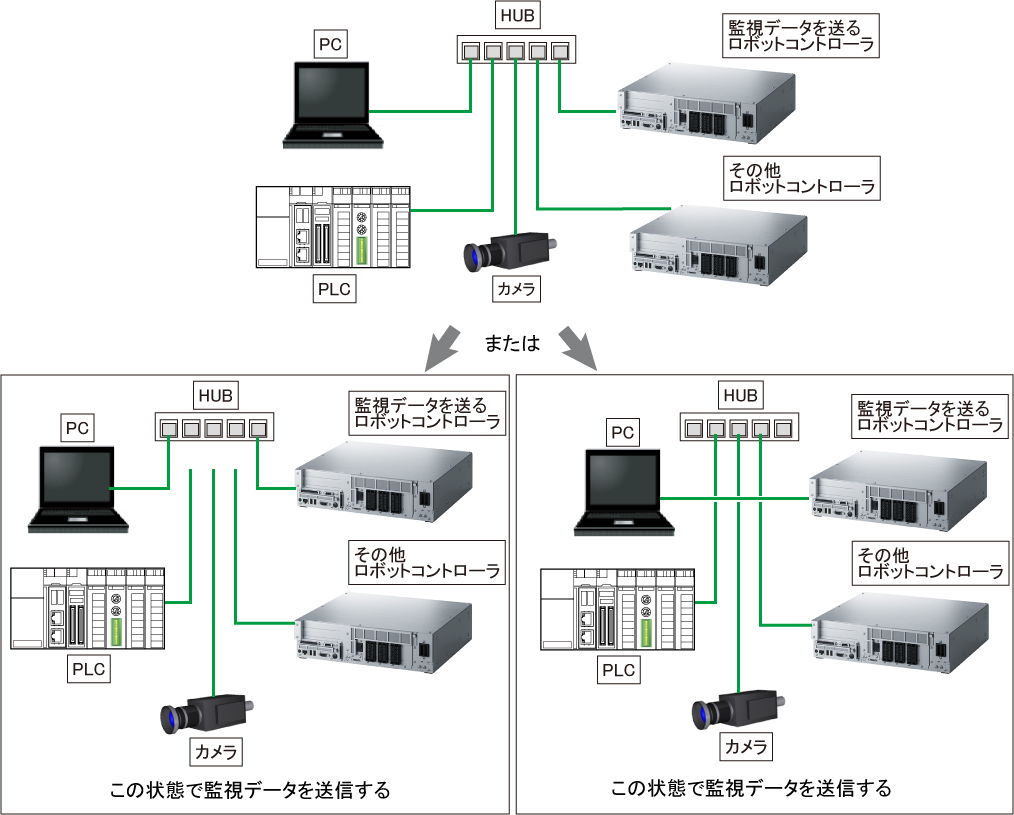
インストール済みPCとロボットコントローラが一対一となるように接続しないと、監視データが正しく送信されない可能性があります。
WINCAPSIIIによる送信
「監視領域データ」にチェックを入れ、コントローラへ送信します。
詳しい送信方法はWINCAPSIIIガイドの「ロボットコントローラとの通信」を参照してください。
ただし、WINCAPSIIIがインストールされたPCとロボットコントローラとの接続は、上記"送信前の準備"の内容のとおりに行ってください。
RC8Aセーフティパラメータツールによる送信
1
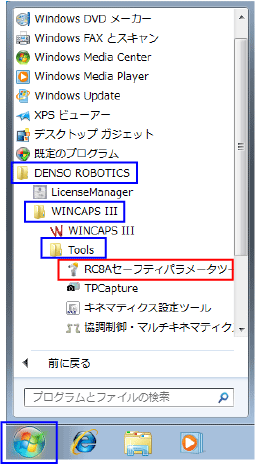
RC8Aセーフティパラメータツールを立上げます。
操作経路:PC[スタート]ボタン - [すべてのプログラム] - [DENSO ROBOTICS] - [WINCAPSIII] - [Tools] - [RC8Aセーフティパラメータツール]
2
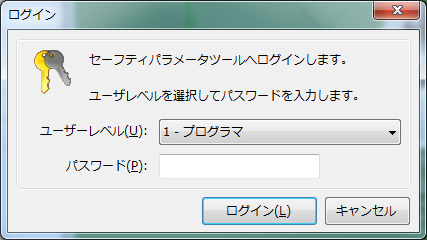
[プログラマ]でログインします。
3
WINCAPSIIIで作成したプロジェクトを開きます。
操作経路:[ファイル] - [プロジェクトを開く]

プロジェクトを開くとき、RC8Aセーフティパラメータツールによって、パラメータの範囲チェックが行なわれます。
4
[安全監視パラメータ]および[領域監視パラメータ]の値に間違いがないか確認します。
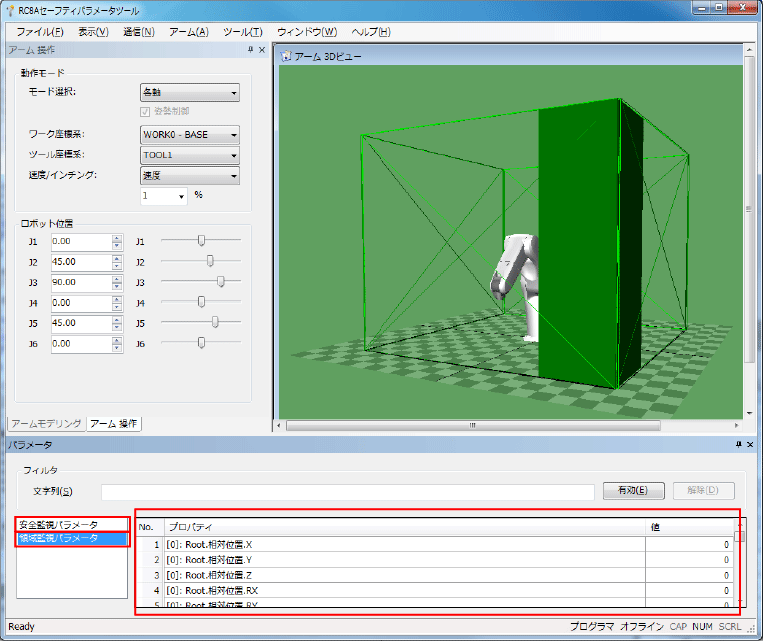
パラメータの変更はRC8Aセーフティパラメータツールではできません。WINCAPSIIIを使用して変更してください。
5
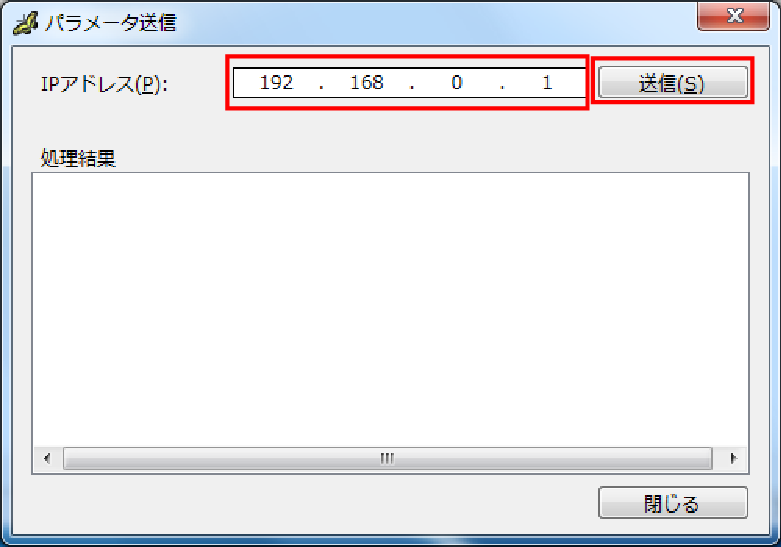
コントローラへ監視モデルのデータを送信します。
操作経路:[通信] - [パラメータ送信]
IPアドレスを指定して[送信]ボタンを押します。
-
[送信]ボタンを押すと、RC8Aセーフティパラメータツールによって以下の内容が実施されます。
- パラメータの送信
- 書込みチェック
パラメータを送信した後、まず、セーフティモーションからパラメータを受信します。次に受信したパラメータと送信したパラメータとを比較し、違いがないかをチェックしています。 - パラメータを送信すると、セーフティモーションによって、パラメータの範囲チェックが行われます。
6
セーフティモーションへのパラメータの書込みが成功すると「セーフティパラメータ送信に成功しました。」と表示されます。
「セーフティパラメータ送信に失敗しました。」と表示された場合は、状況に応じた処置を行って再送してください。
| メッセージ | 不具合理由 |
|---|---|
| 「コントローラに接続できませんでした。」 | コントローラとの接続に失敗した場合 |
| 「Ver.2.1.0未満のコントローラとは通信できません。」 | コントローラのバージョンがVer2.1.0未満の場合 |
| 「RC8Aコントローラではありません。」 | コントローラがRC8Aでない場合 |
| 「ロボットタイプが異なります。」 | コントローラのロボットタイプが異なる場合 |
| 「通信中に予期せぬエラーが発生しました。」 | 通信中に異常があった場合 |
7
ロボットコントローラを再起動し、ロボットを安全な速度で動作させて、安全機能が意図したとおりの動きになっているか確認してください。安全機能が意図した動きになっていない場合は、パラメータを修正してください。
パラメータを送信後、ロボットコントローラを再起動するまでは、送信したパラメータはロボットコントローラに反映されません。パラメータ送信後は必ずロボットコントローラを再起動してください。
ID : 2489