
ID : 2504
簡単設定(WINCAPSIII)
実際の使用環境に合わせた各種設定をすることで、ロボットを最適状態で使用することができます。この機能を使うと、その設定を簡単に行うことができます。(Ver.2.0.*以降)
- この機能はVS-A3, VS-A4, VS-S2, HSR, HSA1の各ロボットでのみ使用可能です。
- ティーチングペンダントでの操作手順は「簡単設定(ティーチングペンダント)」 を参照してください。
設定項目
- 床置き、天吊り設定(*1)
- 先端負荷質量[g]
- 負荷重心位置X[mm]
- 負荷重心位置Y[mm]
- 負荷重心位置Z[mm]
- 負荷重心イナーシャIx[kgcm^2]
- 負荷重心イナーシャIy[kgcm^2]
- 負荷重心イナーシャIz[kgcm^2]
- 最適速度制御設定
- 高軌跡制御有効設定
- 重力補償設定(*1)
- たわみ補正機能有効設定 (*1)
*1:VSのみ
操作手順
ここではVS-A4ロボットを例に手順を説明します。
1
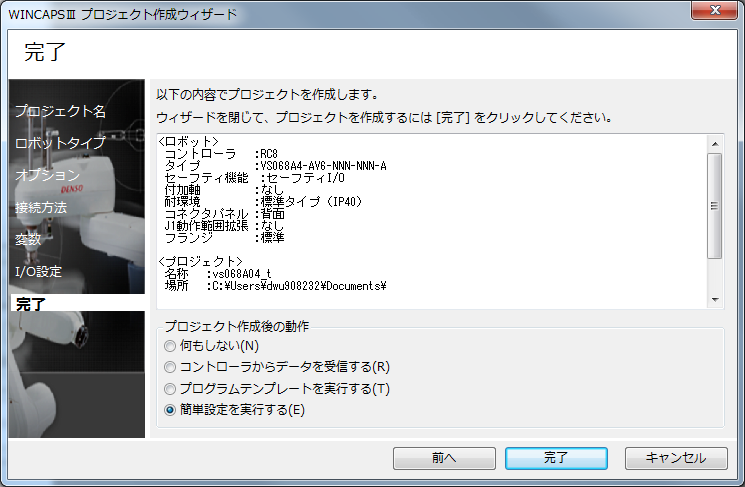
新規プロジェクトを作成します。
手順最後の「プロジェクト作成後の操作」を「簡単設定を実行する」にチェックを入れ[完了]を押します。
2
簡単設定画面が表示されます。
この画面では設定する項目と、現在設定されている値を確認することができます。確認したら[次へ]を押します。
ティーチングペンダントで簡単設定する場合は、[中止]を押します。
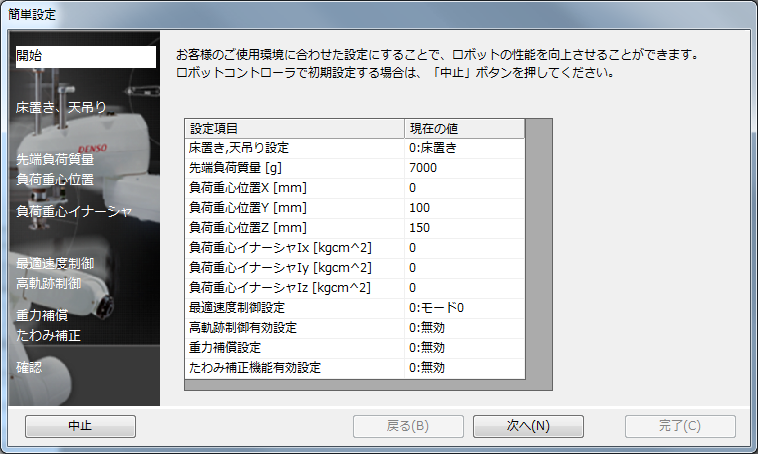
各項目の設定画面で[戻る]を押すと、前の項目の設定画面に戻ります。
3
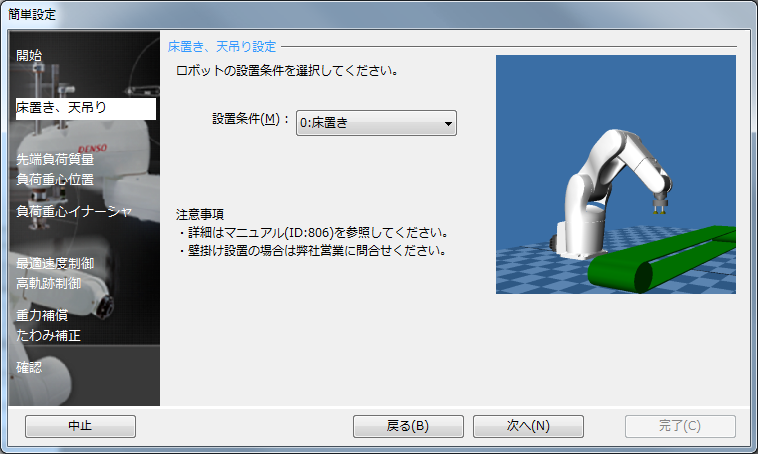
「床置き、天吊り設定」を行います。
リストを選択すると選択肢が表示されます。[0:床置き]または[1:天吊り]を選択し[OK]を押します。
詳細は「ロボットの設置条件設定」を参照してください。
完了したら[次へ]を押します。
4
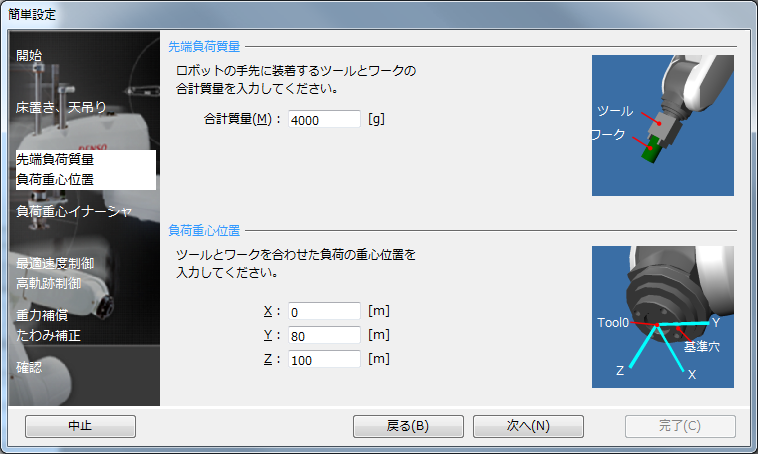
「先端負荷質量」と「負荷重心位置」の設定を行います。
- 先端負荷質量
入力欄を選択し、値を入力します。(0~7000) - 負荷重心位置
入力欄を選択し、各重心位置の値を入力します。(-10000~1000)
完了したら[次へ]を押します。
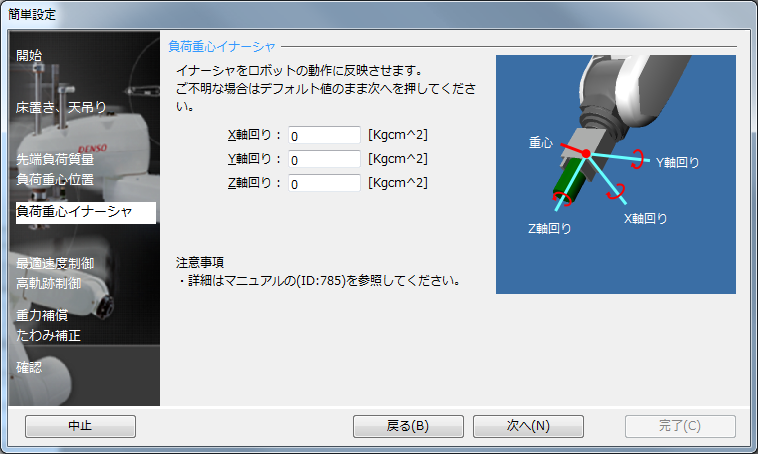
5
「負荷重心イナーシャ」を設定します。
入力欄を選択し、各軸回りの値を入力します。(0~100000)
詳細は「先端負荷イナーシャの計算について」を参照してください。
完了したら[次へ]を押します。
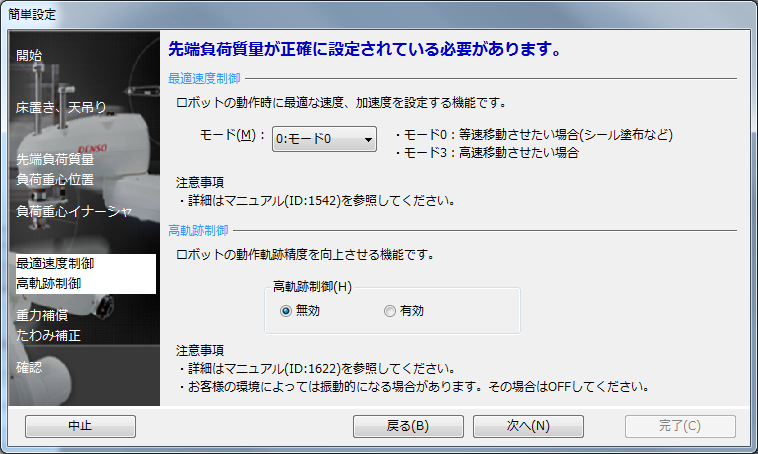
6
「最適速度制御」と「高軌跡制御」を設定します。
- 最適速度制御
リストを選択すると選択肢が表示されます。[0:モード0]または[3:モード3]を選択します。
詳細は「最適速度制御機能」を参照してください。 - 高軌跡制御
無効/有効を設定します。
詳細は「高軌跡制御」を参照してください。
完了したら[次へ]を押します。
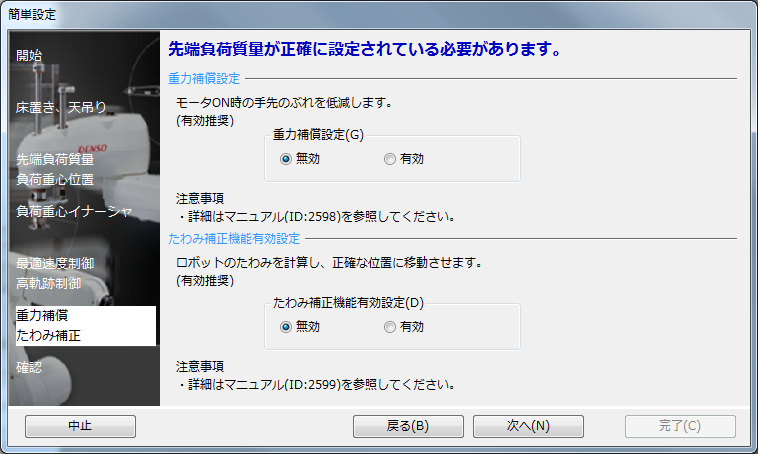
7
「重力補償設定」と「たわみ補正機能有効設定」を設定します。
完了したら[次へ]を押します。
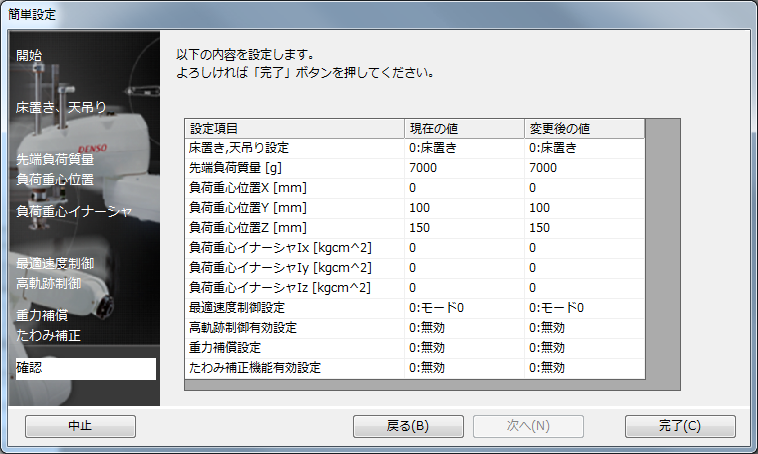
8
設定した内容を確認して[完了]を押します。今まで設定した各項目の値がプロジェクトに保存されます。
以上で操作は終了です。
設定した内容は、プロジェクト送信時にコントローラへ送信されます。
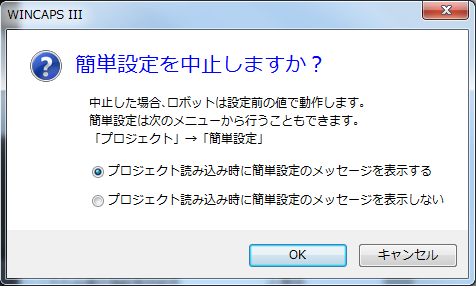
簡単設定の中止
各項目の設定画面で[中止]を押すと、簡単設定を途中で中止することができます。[OK]を押すと中止します。中止すると、それまでに設定した各項目の値は保存されません。
中止の画面では、次回起動時に簡単設定を表示するかしないかを選択できます。
設定内容の変更
いったん設定した内容を変更したい場合は、メニュー「プロジェクト」の「簡単設定」から行います。
ID : 2504