
ID : 785
先端負荷イナーシャの計算について
先端負荷のイナーシャ(慣性モーメント)を求める計算例です。
ハンドの設計にCADなど使用する場合は、CADで値を求めてください。
先端負荷とはロボットフランジにつけるハンドなどのエンドエフェクタとワークをあわせたものです。
先端負荷イナーシャの計算は以下の点で使用します。
- ロボット本体の仕様"最大許容イナーシャ"を超える先端負荷をつけてはいけません。
- プロジェクト内の使用条件パラメータへ先端負荷条件を入力することで"重力補償制御機能(GrvCtrl)"や"最適速度制御機能(SpeedMode)"がより適切に動作するようになります。
ロボット本体の仕様"最大許容イナーシャ"の単位は"kgm²"です。
使用条件パラメータでの先端負荷イナーシャの単位は"kgcm²"です。
条件にあわせて計算してください。
イナーシャ(慣性モーメント)の計算式
各形状(円柱1、円柱2、直方体、球、重心位置が回転軸上にない場合、)の基本的なイナーシャの計算式です。
- l : イナーシャ(回転モーメント)
- m : 質量
- r : 半径
- a, b, c, L : 長さ
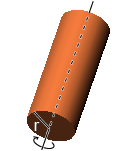
円柱1(円の中心軸で回転)
円の中心軸を回転中心とする。
計算式 l = 1/2 * m * r^2
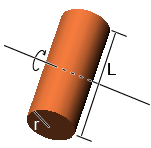
円柱2(円の中心軸に直交した軸で回転)
回転軸が重心を通る。
計算式 l = 1/4 * m * ( r^2 + 1/3 * L^2)
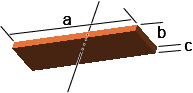
直方体
回転軸が重心を通る。
計算式 l = 1/12 * m * ( a^2 + b^2 )
球
回転軸が重心を通る。
計算式 l = 2/5 * m * r^2

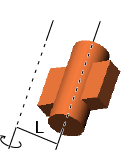
重心位置が回転軸上にない場合
lg:重心回りのイナーシャ
計算式 l = lg + m * L^2
J4、J5、J6回りのイナーシャの計算例
下記のエンドエフェクタを例とします。
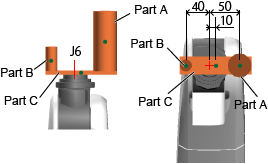
- PartA
- 半径(ra):20、長さ(la):100、質量(ma):1.0、回転軸からの重心の距離(La)
- PartB
- 半径(rb):10、長さ(lb):40、質量(mb):0.1、回転軸からの重心の距離(Lb)
- PartC
- 長さ(hc):120、幅(wc):15、厚さ(tc):10、質量(mc):0.14、回転軸からの重心の距離(Lc)
J6回りのイナーシャ(Ij6)
PartAのJ6回りのイナーシャは
Ia6 = 1/2 * ma * ra^2 + ma * La^2
PartBのJ6回りのイナーシャは
Ib6 = 1/2 * mb * rb^2 + mb * Lb^2
PartCのJ6回りのイナーシャは
Ic6 = 1/12 * mc * (hc^2 + wc^2) + mc * Lc^2
ハンド全体のJ6回りのイナーシャは
Ij6 = Ia6 + Ib6 + Ic6
J5回りのイナーシャ(Ij5)
各部品の回転軸からの重心の距離はロボットの図面を参考に算出ください。J5回り、J4回りのイナーシャは該当軸より下位の軸位置によって重心の距離が異なります。最大の距離となる位置で計算してください。
PartAのJ5回りのイナーシャは円柱の中心軸に交差する回転軸とする。
Ia5 = 1/4 * ma * (ra^2 + 1/3 * la^2) + ma * La^2
PartBのJ5回りのイナーシャは円柱の中心軸に交差する回転軸とする。
Ib5 = 1/4 * mb * (rb^2 + 1/3 * lb^2) + mb * Lb^2
PartCのJ5回りのイナーシャは
Ic5 = 1/12 * mc * (wc^2 + tc^2) + mc * Lc^2
ハンド全体のJ5回りのイナーシャは
Ij5 = Ia5 + Ib5 + Ic5
J4回りのイナーシャ(Ij4)
J4はJ5同様に求めてください。
ID : 785