
ID : 2487
監視モデルの作成・保存
WINCAPSIIIのアームモデリング機能で監視モデルを作成し、データを出力します。
監視モデルの作成とは、監視対象のモデル作成と、規制領域のモデル作成のことです。
プロジェクトの新規作成
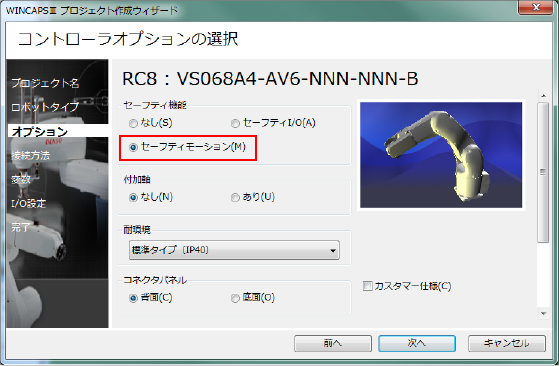
プロジェクト作成時の「コントローラのオプション選択」で、セーフティ機能の「セーフティモーション」を選択します。
プロジェクトの新規作成の詳しい手順は立上げハンドブックの「WINCAPSIIIの起動」を参照してください。
監視対象モデルの作成手順
- ロボット
プロジェクトの新規作成時に指定した型式のモデルが自動的に生成されます。 - ツール
WINCAPSIIIでツールのモデル作成とツール座標系の設定を行います。モデルはアームモデリング機能を使い作成し、ツール座標系の設定はツール設定で行います。使用できるツール番号は0~15です。 - 付加軸
付加軸を使用する場合は、プロジェクトの新規作成時に「あり」を指定します。
以上で監視対象の作成は完了です。
規制領域モデルの作成手順
ここでは、常時規制領域と一時規制領域を設定します。
常時規制領域はフェンスモデル、一時規制領域はオブジェクト(BOX)です。
1
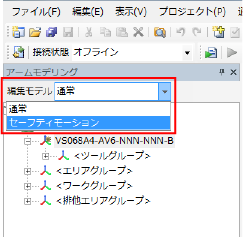
WINCAPSIIIのアームモデリング機能でモデルを作成します。
「編集モデル」を[セーフティモーション]に切替えます。
2
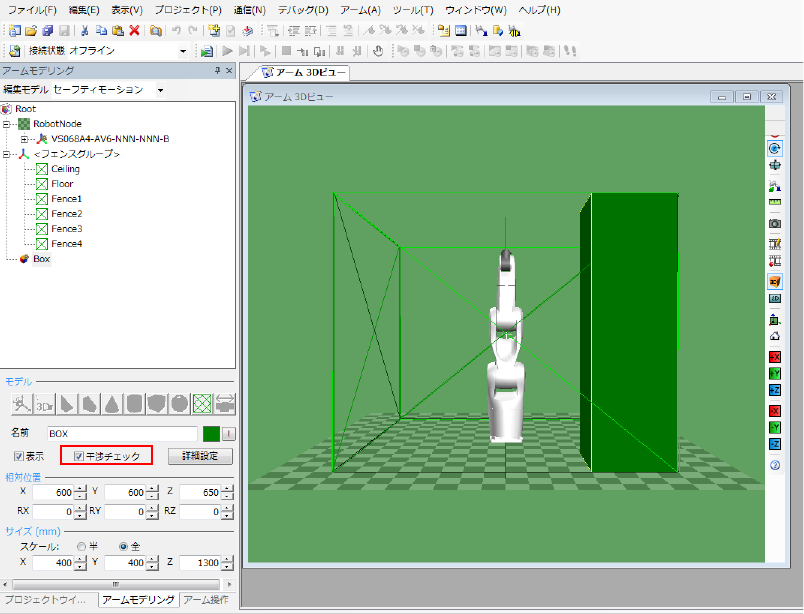
対象のオブジェクトを選択し、「干渉チェック」が有効になっていることを確認します。
フェンスモデルは常に干渉チェックが有効です。
3
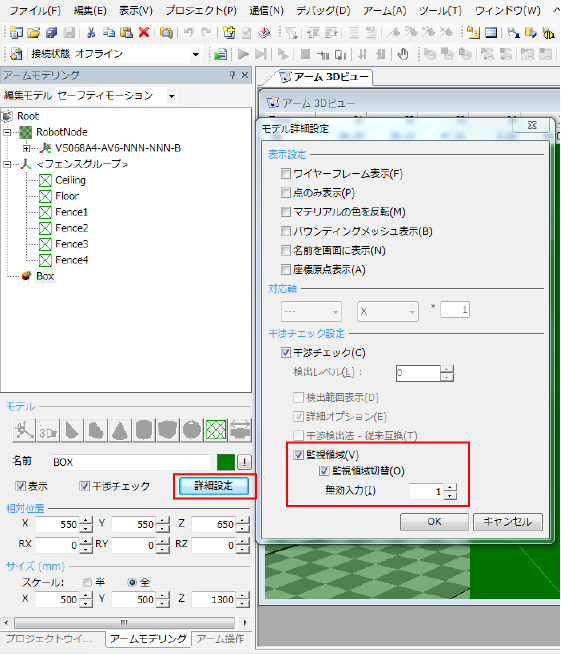
「詳細設定」から「モデル詳細設定」を開き、「干渉チェック設定」を設定します。
フェンスモデルは変更不可です。
一時規制を行いたいオブジェクト(BOX)の場合は、[監視領域切替]にチェックを入れ、使用したいI/Oの番号と同じ番号0~3を、無効入力で設定します。
4
オブジェクト(BOX)を増やしたい場合は、STEP1からSTEP3を繰り返します。
保存
監視領域のデータをコントローラで処理できるデータに変換、保存します。
操作経路:メニュー[アーム] - [監視領域データ出力(M)]
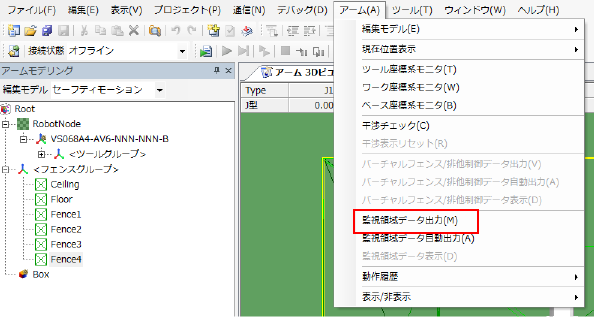
出力した監視領域のデータを確認したい場合は、メニュー[アーム] - [監視領域データ表示(D)]で確認することができます。
監視モデルの修正を行ったら、[監視領域データ出力(M)]を行ってください。
[監視領域データ自動出力(A)]を有効にすると、プロジェクト保存時に自動で[監視領域データ出力(M)]が実行され、データが上書きされます。
ID : 2487