
ID : 2486
監視対象と規制領域のモデル概要
監視対象と規制領域
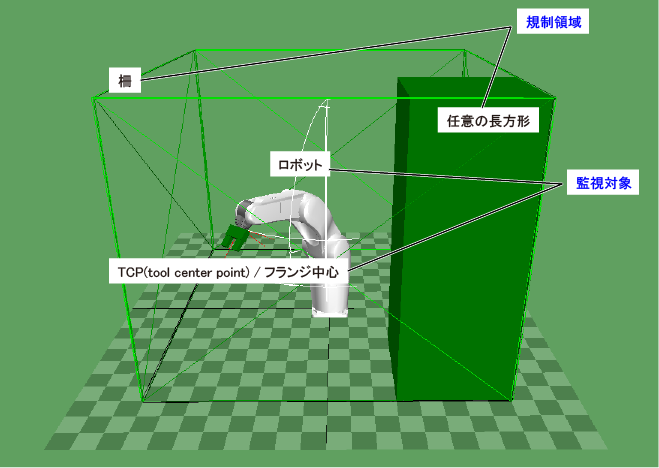
監視対象と規制領域を以下に示します。
| 分類 | モデル名 | 詳細 | |
|---|---|---|---|
| 監視対象 | ロボットモデル | ロボットの速度と外形を監視します。 速度の監視点は各ロボットごとに決まっています。詳しくは「Robot Speed Monitoring (RSM)」のロボットアーム上の点を参照してください。 |
|
| ツールモデル | ツールの速度と外形を監視します。 速度の監視点は、TCPとフランジ中心です。 ツールが他の機器と接触しないように監視させたい場合、ツールモデルは、実際のツールの外形と同じか、それより大きいものにしてください。 |
||
| 規制領域 | 常時 | 柵モデル | 監視対象が領域内か常に監視します。ロボットを囲っている必要があります。 |
| 一時 | 任意の長方形モデル | 監視対象との接触を監視します。 ある周辺機器に対し、監視対象が接触しないように監視したい場合、任意の長方形モデルは、対象の周辺機器の外形と同じか、それより大きいものにしてください。 「監視領域*無効入力」の指定で、監視するかしないかの切替えができます。 |
|
モデル化の方法
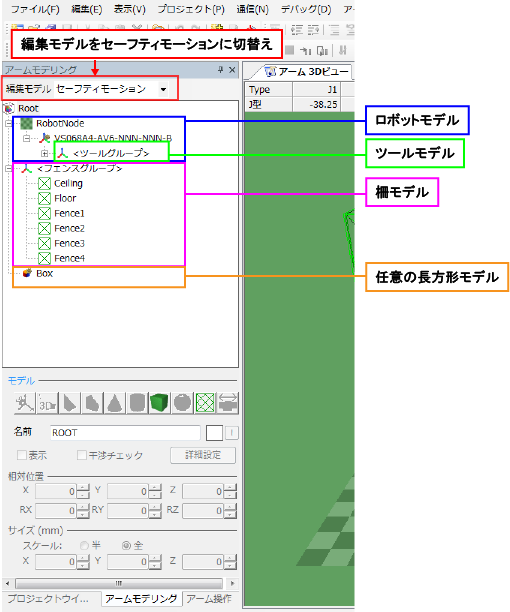
WINCAPSIIIのアームモデリング機能を使い、モデルの作成をすることができます。
モデル作成時の制約
各モデルは指定の階層に作成してください。
| モデル名 | 制約 |
|---|---|
| ロボットモデル | Robot Node以下のオブジェクト。(ツールグループを除く) |
| ツールモデル | ツールグループ以下のオブジェクト。 |
| 柵モデル | Root直下のオブジェクト。 |
| 任意の長方形モデル | Root直下のオブジェクト。 |
ID : 2486