
ID : 2266
ベース定義の表示・設定
ワールド座標原点から見たロボットベース位置を設定します。
ワールド座標は、ユーザが指定する原点を基準とした座標系で、複数台のロボットに対する位置指定を共通の座標系で行うことができます。
ワールド座標の原点を設備原点とすることで、各ロボットに対し設備座標での位置指定ができます。
この機能を使う場合は、ユーザパラメータ190番「起動時BASE番号」を1にする必要があります。
操作経路:基本画面 - [F2 アーム] - [F6 補助機能] - [F10 ベース]
[ベース設定]ウィンドウが表示されます。
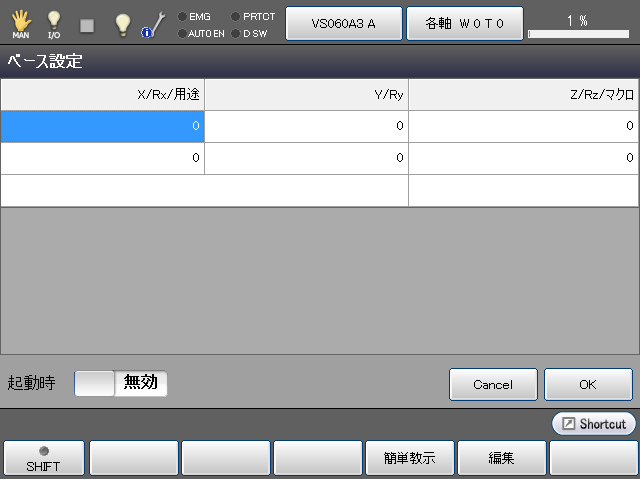
| 使用可能なファンクションキー | |
|---|---|
| [F4 簡単教示] | 3箇所のポイントをロボットで教示することでベース定義を設定します。 |
| [F5 編集] | 変更したい座標要素を選択し、[編集]を押すと、テンキーが表示されます。 テンキーを使用して値を入力し、テンキー上の[OK]を押すと、値が変更されます。 変更した値は、[ベース設定]ウィンドウの[OK]を押すことで確定します。 |
| 起動時[有効/無効] | 起動時にベース設定を"有効"にするか、"無効"にするかを指定します。 起動時"有効"は再起動するまで有効になりません。 |
教示後にベース定義を設定・変更する場合は、ConvertPosBaseで教示点の修正を行います。詳細はConvertPosBaseの「用例」を参照してください。
ID : 2266
- このページに関連する情報
- 簡単教示によるベース定義