
ID : 1739
アーム補助機能の表示・設定
操作経路:[F2 アーム] - [F6 補助機能]
ロボットを動かす上での様々な使用条件の設定、「ツール座標」や「ワーク座標」、「エリア」、「経路点」の設定などを行うメニューが表示されます。
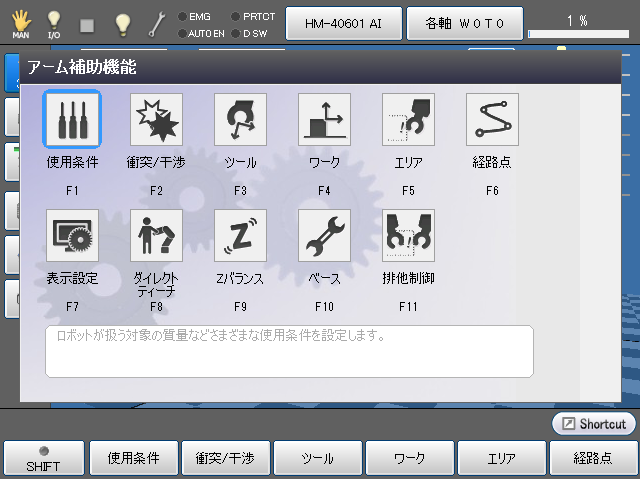
[F6 補助機能]を押すと、次のような[アーム補助機能]ウィンドウが表示されます。
| 使用可能なファンクションキー | |
|---|---|
| [F1 使用条件] |
[使用条件]ウィンドウが表示されます。 ロボットの先端負荷質量をはじめ、ロボットを動かす上での様々な使用条件を設定します。 |
| [F2 衝突/干渉] |
[衝突/干渉]ウィンドウが表示されます。 「衝突検出」や「バーチャルフェンス」の設定を行います。 |
| [F3 ツール] |
[ツール設定]ウィンドウが表示されます。 |
| [F4 ワーク] |
[ワーク設定]ウィンドウが表示されます。 「ワーク座標系」の設定を行います。 |
| [F5 エリア] |
[エリア設定]ウィンドウが表示されます。 「エリア」の領域設定を行います。 |
| [F6 経路点] |
[経路点設定]ウィンドウが表示されます。 経路点の設定を行います。 |
| [F7 表示設定] | [アーム]画面の表示項目の設定を行います。 |
| [F8 ダイレクトティーチ] |
ボタンを押すとダイレクトモードになリます。 ブレーキを解除し、ティーチングペンダントの[OK]を押すと、ダイレクトモードが開始されます。 詳細は機能ガイドの「ダイレクトティーチング」を参照してください。 |
| [F9 Zバランス] | [Z バランス調整]ウィンドウが表示されます。 HM標準ロボットは、エアー圧力の調節を行います。 HM標準以外のH*シリーズロボットとXRロボットは、重力補償補正を行います。(Ver.2.2.*以降) |
| [F10 ベース] | [ベース設定]ウィンドウが表示されます。(Ver.1.9.*以降) |
| [F11 排他制御] | [排他制御]ウィンドウが表示されます。(Ver.1.12.*以降) 排他エリアの有効/無効を切替えたり、排他通信設定や排他監視設定を行います。 |
ダイレクトティーチはH*シリーズ、ZバランスはH*シリーズおよびXRロボットだけでボタンが表示され、機能が使用可能になります。
- ダイレクトティーチを実行する際にZ軸エアバランスが未調整の場合は、[Zバランス調整]ウィンドウが表示されますので、調整を実施してください。
- Z軸エアバランスが未調整のままの場合は、アームが落下することがありますので、注意してください。
ID : 1739