
ID : 799
経路点設定機能
経路点設定機能とは一つの経路データに複数の経路点の位置データを登録し、保存できる機能です。自由曲線補間などではこの経路データを指定し、位置データを順番に滑らかに通過する動きをします。
経路は20個用意されており、ひとつの経路には経路点を最大5,000個登録することができます。
経路データ内の経路点データはポジション型データで保存されます。
経路のメモリ
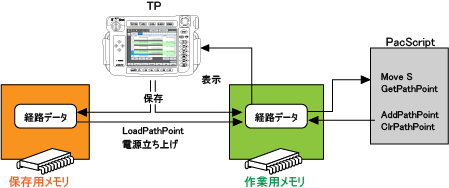
コントローラには電源OFF時にデータを保持する保存用メモリと、データを保持しない作業用メモリがあります。コントローラは電源立上げ時に保存用メモリから作業用メモリへ経路データを全て読込みます。
自由曲線補間動作はコマンド"Move S"で実施しますが、そこで使用する経路データは作業用メモリ内のデータです。
PacScript上で動的に経路点を編集する場合は、下記のコマンドを使用します。ただし、PacScriptのコマンドで操作できる経路データは作業用メモリ内のデータのみです。保存用メモリ内の経路データを編集することはできません。
| コマンド名 | 機能 |
|---|---|
| LoadPathPoint | 経路データを読込みます。 |
| ClrPathPoint | 指定した経路の全ての経路点をクリアします。 |
| AddPathPoint | 経路データに経路点を追加します。 |
経路データの登録方法
保存用メモリへの経路データ登録は、ティーチングペンダントで行います。登録画面の各ボタンの説明は"経路点設定画面"を参照してください。
ロボット形態を設定しない場合の注意
経路点設定機能は、位置・姿勢情報、 および「ロボット形態の情報」を使って、ロボットの動作経路を構築する機能であり、経路点のFIGに-1、 -2、 -3を設定した場合、すなわちロボット形態を明示的に設定しない場合は、下記のようなふるまいをします。
コマンド、編集画面での指定
AddPathPointコマンドやティーチングペンダントの経路点編集画面による経路点編集で、経路点のFIGに-1、 -2、 -3を設定した場合は下記のようになります。
| Fig=-1 | 経路点設定時のロボットの現在Figに置換えます |
| Fig=-2、Fig=-3 | 経路点設定時のロボットの現在各軸角度を使って自動計算したFigに置換えます |
WINCAPSIIIでの指定
WINCAPSIIIの編集画面で経路点のFIGに-1、 -2、 -3を設定し、コントローラへ経路点を送信した場合は、下記のようになります。
| Fig=-1 | 経路点受信時のロボットの現在Figに置換えます |
| Fig=-2、 Fig=-3 | 経路点受信時のロボットの現在各軸角度を使って自動計算したFigに置換えます |
データ受信時のロボットの姿勢と、プログラム実行時のロボットの姿勢が異なると、予想外の動作をする可能性がありますので、ご注意ください。
WINCAPSIII上の経路点編集画面では、Figの値は-1、 -2、 -3がそのまま表示されます。
ID : 799