
ID : 7520
プログラミング構成
Rockwell社製PLCの特徴
Rockwell社製のPLCは、電源を切る前の状態を保持する仕様になっています。
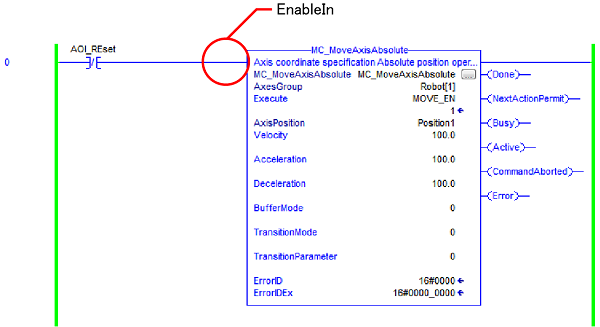
そのため、停電などによりPLCの電源が遮断されると、処理途中のAOIは、その状態を保持したままになります。電源を再投入し、再び処理を開始すると、AOIは電源が遮断される前の状態から処理を開始します。
ロボットの状態によっては、意図しない動作をする恐れがあります。
対策として、AOIのEnableInを一度 "FALSE" にすることで、AOI内部の処理がリセットされます。
プログラミング構成図
Command-Slave機能を使った、"Studio 5000"で作成するプログラム構成を、以下に示します。
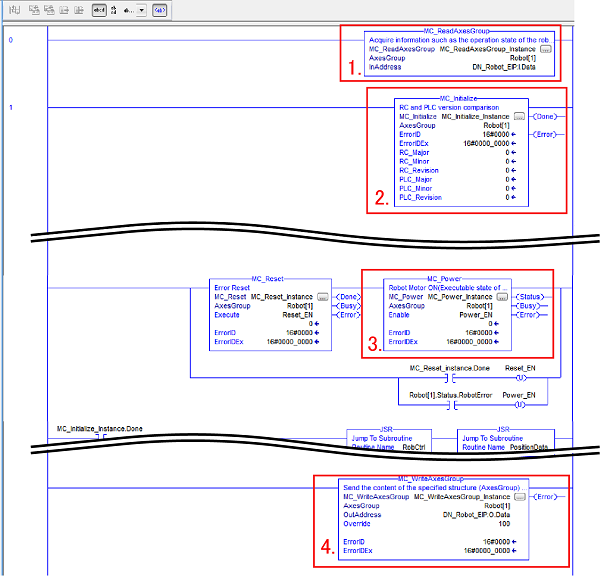
1.MC_ReadAxesGroup
ロボットコントローラから、ロボットの動作状況などのデータを取得し、"AxesGroup"に格納します。このAOIで取得したデータは、Command-Slaveの他のAOIでロボットを制御するために使用されます。
したがって、Command-Slave機能を使用する際は、このAOIを必ずプログラムの最初に配置してください。
AOIの詳細は、Command-Slaveリファレンスガイド_Rockwellの「MC_ReadAxesGroup」を参照してください。
2.MC_Initialize
PLCとロボットコントローラのCommand-Slaveのバージョンを取得し、同じかどうかを調べます。
PLCとロボットコントローラのCommand-Slaveのバージョンが一致しないと、ロボットが正しく動作しない可能性があります。また、最初の通信以降はPLCとロボットコントローラが正しく通信しているかを監視することができます。
したがって、"MC_ReadAxesGroup"以外のAOIを配置する前に、このAOIを配置してください。
AOIの詳細は、Command-Slaveリファレンスガイド_Rockwellの「MC_Initialize」を参照してください。
3.MC_Power
AOIカテゴリ"動作"のAOIを実行可能状態にし、ロボットのモータをONにします。AOIカテゴリ"動作"のAOIは、実行する前に、このAOIで実行可能状態にすることが必要です。
したがって、AOIカテゴリ"動作"のAOIより先に、このAOIを配置してください。
AOIの詳細は、Command-Slaveリファレンスガイド_Rockwellの「MC_Power」を参照してください。
4.MC_WriteAxesGroup
Command-Slaveの他のAOIで更新された、"AxesGroup"内の指令をロボットコントローラへ送信します。ロボットコントローラはこのAOIから送信された指令を受けて、ロボットを制御します。
したがって、Command-Slave機能を使用する際は、このAOIを必ずプログラムの最後に配置してください。
AOIの詳細は、Command-Slaveリファレンスガイド_Rockwellの「MC_WriteAxesGroup」を参照してください。
ID : 7520