
ID : 5171
コンプライアンス機能の使い方
コンプライアンス機能の使い方を以下に示します。
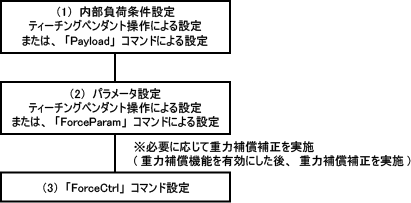
(1)内部負荷条件設定
1または2の方法で「先端負荷質量」と「負荷重心位置」を設定します。
(2)パラメータ設定
1または2の方法でパラメータを設定します。
- ティーチングペンダントにて設定します。
- 「ForceParam」コマンドを使って設定します。
「ForceParam」コマンドによるパラメータ設定は、コントローラの電源をOFFすると、設定前に戻ります。
(3)「ForceCtrl」コマンド設定
「ForceCtrl」コマンドにて「有効/無効」を設定します。
重力補償補正(GrvOffset)
ForceCtrl時にロボット停止状態のトルクと重力補償トルクとを比較し、誤差分を補正します。しかし、ロボットが接触等で外力を受けた状態でForceCtrlを実行した場合、補正値に誤差が生じます。外力(重力を除く)を受けない状態でForceCtrlを実行してください。外力を受けた状態で力制限有効にする場合は、GrvCtrlにて重力補償を有効にした後、GrvOffsetを使用してください。
ID : 5171