
ID : 3330
HSR / HSA1の組合せ
この組合せでは、購入直後、RC8Aロボットコントローラ(以降 RC8A)には、RC8Aの2台分のデータ("プロジェクトデータ")が入っています。しかし、片方のロボット(Robot1)の、CALSET値とRANG値がRC8Aには入っていません。それらの値は、Robot1となるロボットに同梱されているUSBメモリに保存されています。したがって、そのデータをRC8Aに読込ませる必要があります。
上記内容も含め、全体的なセットアップの手順を下記に示します。
| 実施項目 | 概要 |
|---|---|
| 1. 配線 | RC8Aに、ロボットやティーチングペンダントなどを接続します。 |
| 2. ソフトウェアライセンスの登録 | RC8Aに、ソフトウェアライセンスを登録します。 |
| 3. RC8AにCALSET値とRANG値を読込ませる | RC8Aに、Robot1のCALSET値とRANG値を、USBメモリから読込ませます。 |
以下、各実施項目について説明します。
1. 配線
RC8Aに、ロボットやティーチングペンダント、電源ケーブルなど、必要な機器を接続します。
"システム構成"の"HSR / HSA1の組合せ"を参考にして、実施してください。
2. ソフトウェアライセンスの登録
この組合せでは、必ずデュアルアーム制御用ライセンスがRC8Aに登録されて出荷されます。したがって、基本的にはソフトウェアライセンスの登録は不要です。
電動ハンドなどのオプションを使用する場合において、まだそれらのソフトウェアライセンスを登録していない場合は、登録が必要です。
登録はティーチングペンダントで行います。登録方法については、"ティーチングペンダント操作ガイド"の"機能拡張画面の表示、追加/削除"を参照してください。
3. RC8AにCALSET値とRANG値を読込ませる
RC8AにCALSET値とRANG値を読込ませるには、ティーチングペンダントを使用します。
次のステップで行います。
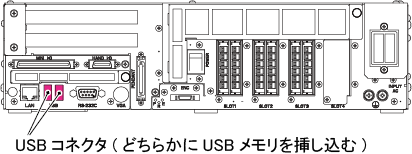
1
RC8Aに、Robot1となるロボットに同梱されていたUSBメモリを挿し込みます。
2
ユーザレベルを「メンテナ」にして、次の操作経路で操作すると、下図の[デュアルアーム設定]ウィンドウが表示されます。
操作経路 : [F6 設定]-[F10 デュアルアーム] |
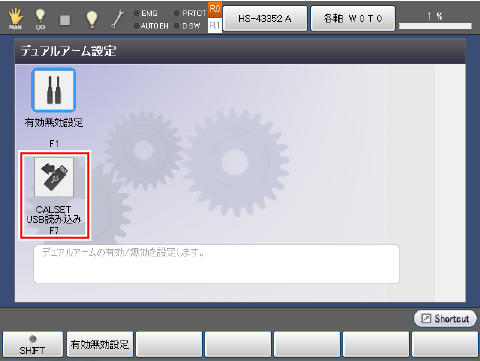
上図のウィンドウにて、[F7 CALSET USB読み込み]を押します。
3
読込みの確認メッセージが表示されます。[OK]を押すと、読込みが始まります。
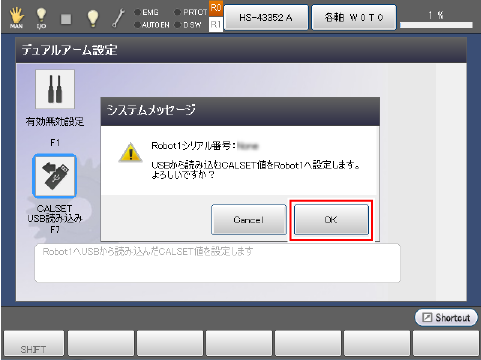
以上で、CALSET値とRANG値の読込みは終了です。
WINCAPSIIIでプロジェクトデータを受信したい場合は、"新規にデュアルアーム制御用プロジェクトデータを受信する場合"を参照してください。
ID : 3330