
ID : 2978
[センサトラッキング]自由曲線補間のセットアップ手順
センサトラッキングで自由曲線補間動作(TrackMove S)を行う場合のセットアップ手順を説明します。
2台以上のロボットで行う場合は、以下の手順でスレーブコントローラの[自由曲線設定]を行ってください。
- マスタコントローラのトラッキング画面 より [F1 トリガ検出開始]を押す。
- スレーブコントローラで設定したいコンベア番号を指定する。
- スレーブコントローラのトラッキング画面より[自由曲線設定]を行う。
1
操作経路:[F10 トラッキング]
自由曲線補間を行うコンベアの[自由曲線設定]ボタンを押します。
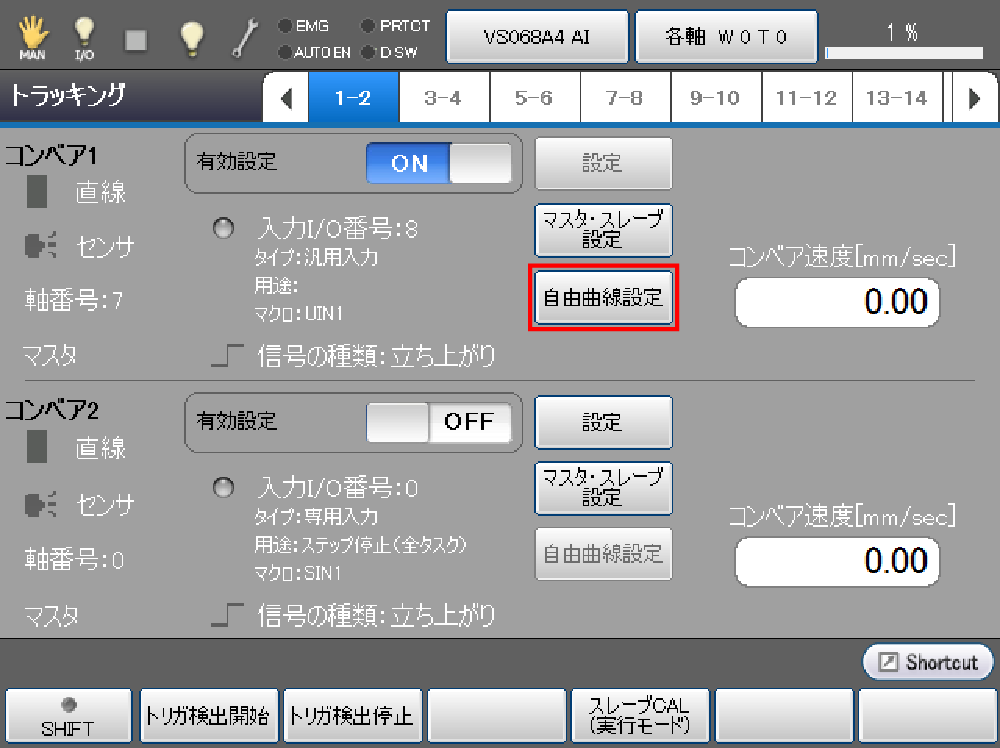
[自由曲線設定]で経路点の設定をしている最中は、ツールおよびワーク座標の変更をしないでください。
2
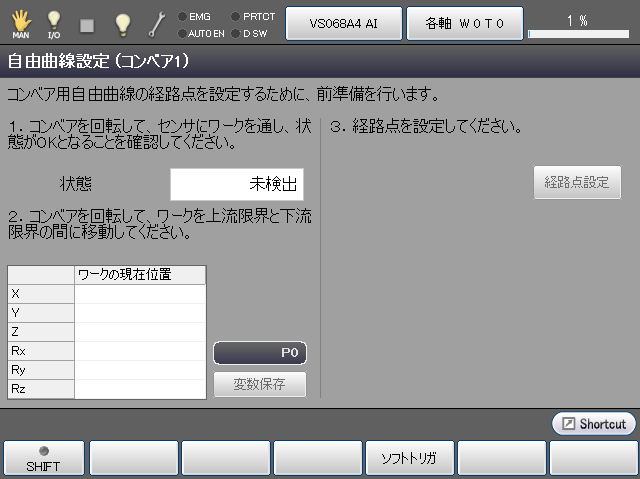
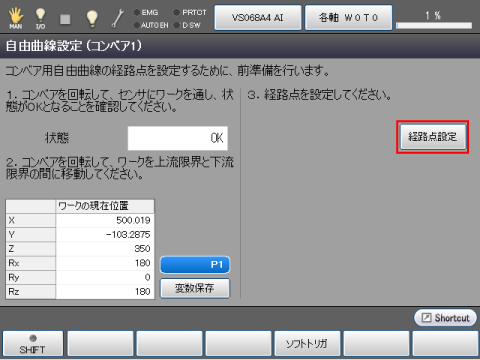
「自由曲線設定」画面が表示されます。
3
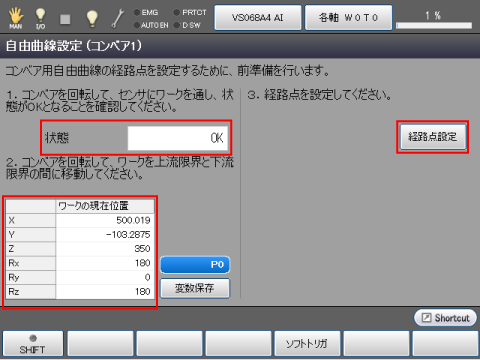
表示された前準備を行います。
- コンベアを回転して、センサにワークを通し、状態がOKになることを確認します。
- コンベアを回転して、ワークを上流限界と下流限界の間に移動します。
ワーク全体が上流限界と下流限界の間に入っている状態にしてください。
1、2の前準備後、[経路点設定]ボタンが有効になります。
4
AddPathPoint用のワーク座標を登録します。この機能はVer.2.7.*以降から使用できます。
AddPathPointを使用しない場合は、この操作は不要です。
変数番号の表示箇所をタッチすると、[コピー先P変数番号入力]のテンキー画面が表示されますので、番号を入力し[OK]を押します。
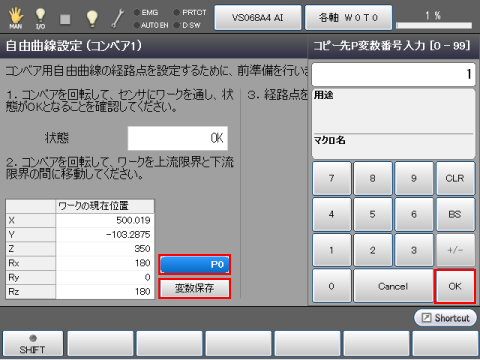
[変数保存]ボタンを押すと、変数にワークの現在位置がコピーされます。
ここで登録した位置をAddPathPointの指定項目の「ワーク座標」として使用します。
5
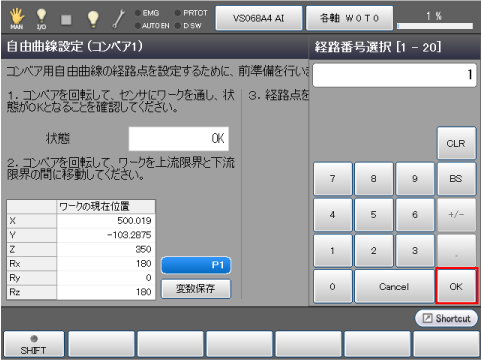
[経路点設定]ボタンを押すと、経路番号を設定する数値入力画面が表示されますので、経路点を登録したい経路番号を指定して[OK]を押します。
6
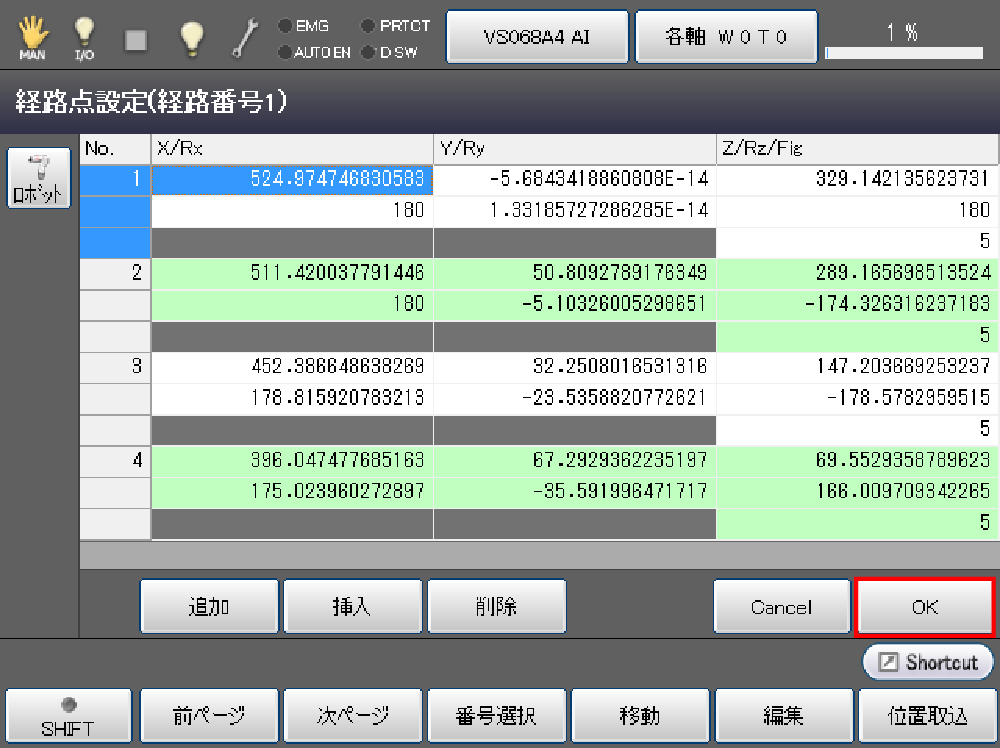
「経路点設定」画面で教示位置までロボットを移動し、[追加]ボタンを押します。
詳しい画面の説明は「経路点設定画面」を参考にしてください。

- 「経路点設定」画面では、コンベアを動かさないでください。
- 経路点の教示位置によっては、上流限界より上流の位置へトラッキング動作を行うことがあります。
トラッキング開始位置を調整したい場合はTrackInRangeを使用してください。
7
全ての経路点を教示したら、[F4 移動]で経路点の確認をします。
「自由曲線移動」をする/しないを選択します。
- 「自由曲線移動」をしない
PTP動作かCP動作の指定後、経路点を選択し[移動]ボタンを押します。ペンダントのデッドマンスイッチを押しながら、OKキーを押し続けてください。
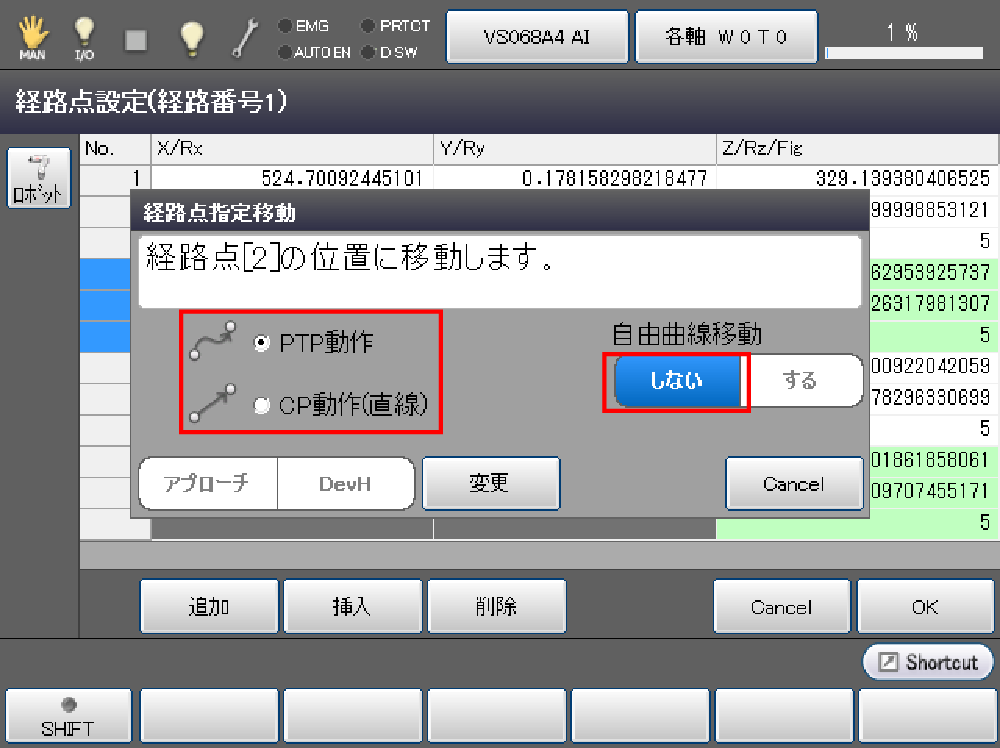
「アプローチ」ボタンでアプローチ距離を指定すると、指定したアプローチ長の位置に移動します。「DevH」ボタンで座標(X、,Y、Z、Rx、Ry、Rz)を指定すると、変数位置から指定した座標分オフセットした位置に移動します。
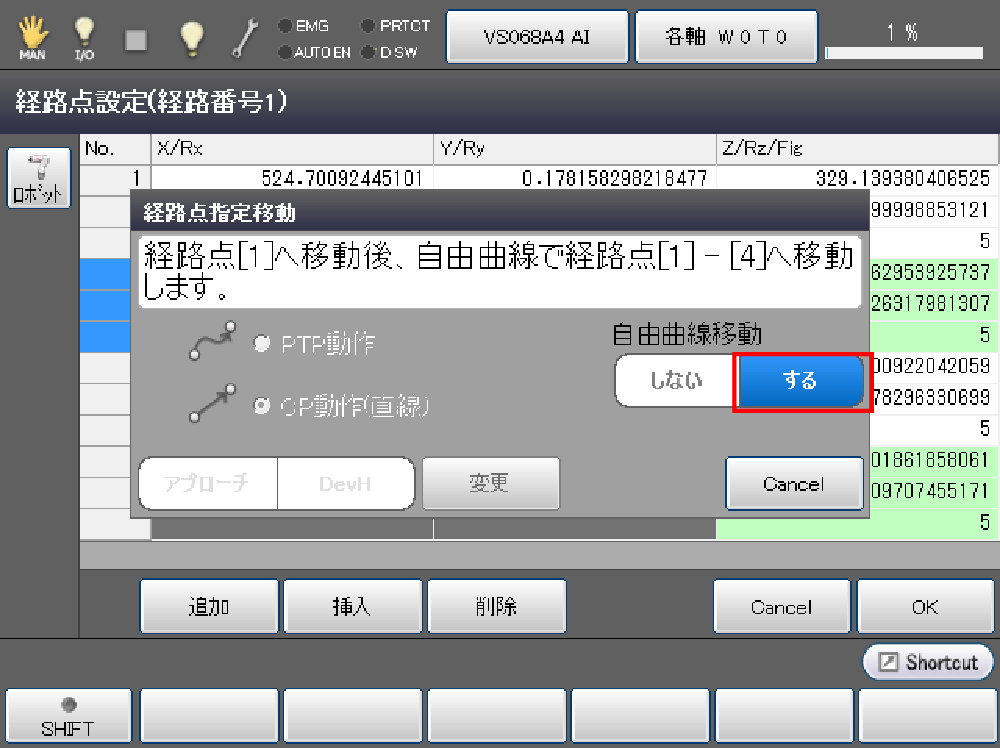
- 「自由曲線移動」をする
経路点[1]まで移動後、設定した全ての経路点を自由曲線補間で移動します。ペンダントのデッドマンスイッチを押しながら、OKキーを押し続けてください。
8
経路点の確認が完了したら[OK]ボタンを押します。
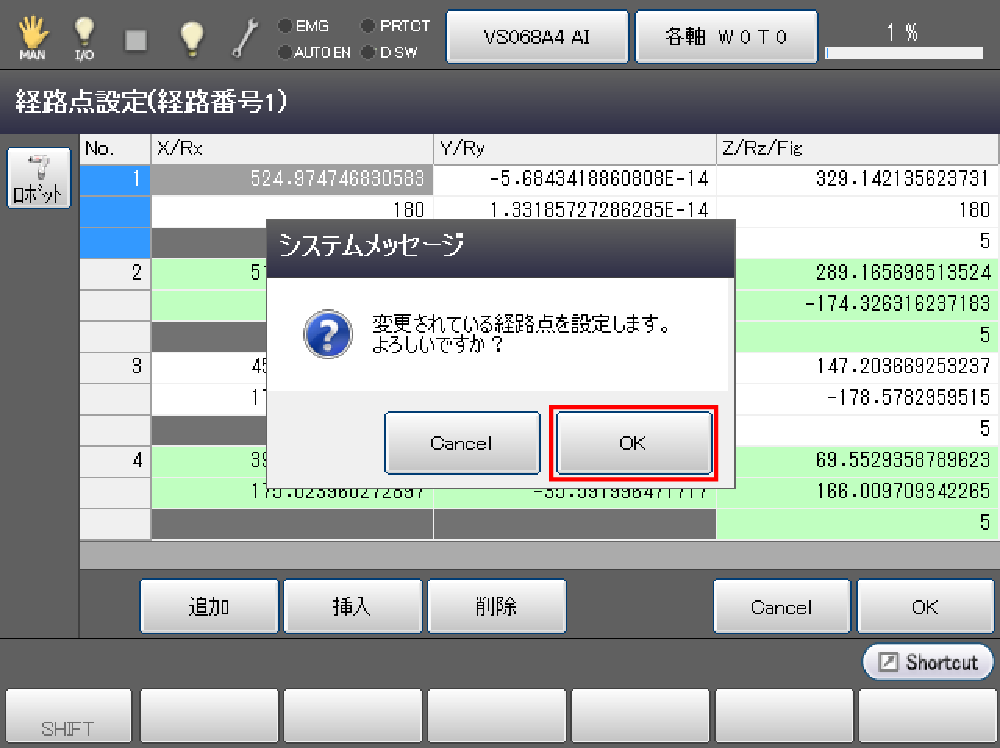
9
メッセージ確認後、[OK]ボタンを押します。経路が登録されます。これで自由曲線設定は完了です。
ID : 2978