
ID : 2973
パラレルリンクロボットの追加設定パラメータ
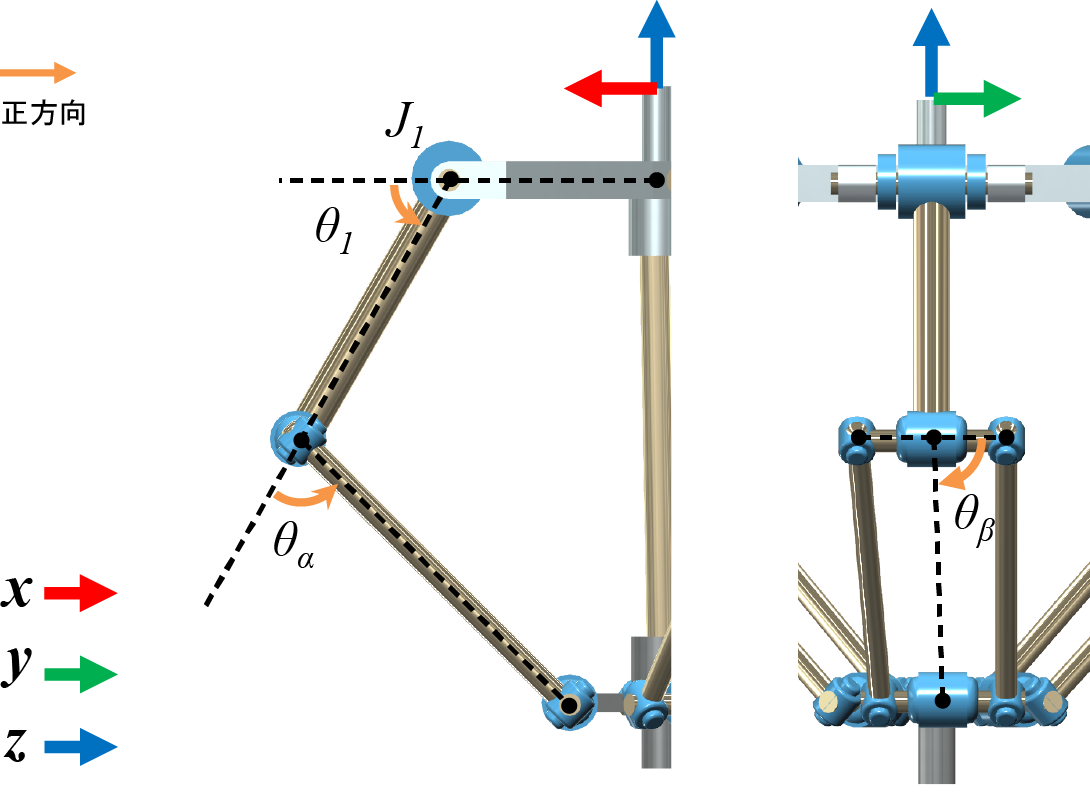
ロボットタイプとしてパラレルリンクロボットを選択した場合、モータ軸角度(θ1)の動作範囲制限に加えて、肘部分の破損防止のために図中に示されるθα、θβの動作範囲を設定する必要があります。
操作手順
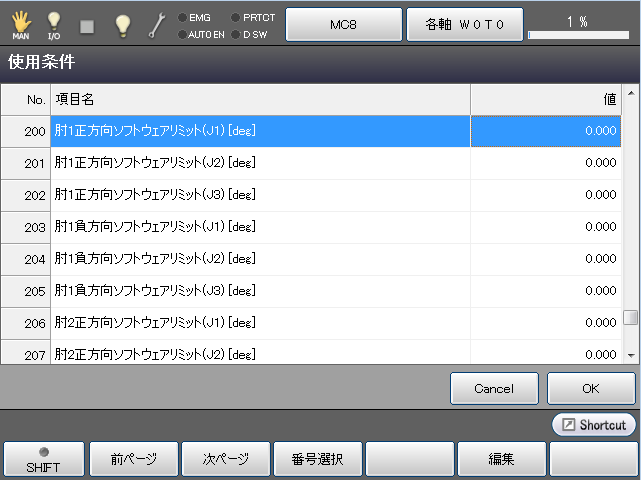
以下の手順で使用条件画面を開き、パラメータを設定します。
操作経路:[アーム画面] - [補助機能] - [F1 使用条件]
θα の動作範囲
θαの動作範囲は以下のパラメータで設定します。
| 番号 | 項目名 |
|---|---|
| 200 | 肘1正方向ソフトウェアリミット(J1)[deg] |
| 201 | 肘1正方向ソフトウェアリミット(J2)[deg] |
| 202 | 肘1正方向ソフトウェアリミット(J3)[deg] |
| 203 | 肘1負方向ソフトウェアリミット(J1)[deg] |
| 204 | 肘1負方向ソフトウェアリミット(J2)[deg] |
| 205 | 肘1負方向ソフトウェアリミット(J3)[deg] |
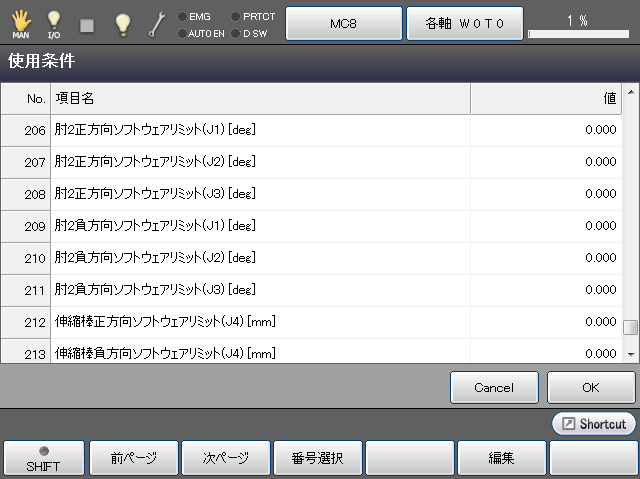
θβの動作範囲
θβの動作範囲は以下のパラメータで設定します。
| 番号 | 項目名 |
|---|---|
| 206 | 肘2正方向ソフトウェアリミット(J1)[deg] |
| 207 | 肘2正方向ソフトウェアリミット(J2)[deg] |
| 208 | 肘2正方向ソフトウェアリミット(J3)[deg] |
| 209 | 肘2負方向ソフトウェアリミット(J1)[deg] |
| 210 | 肘2負方向ソフトウェアリミット(J2)[deg] |
| 211 | 肘2負方向ソフトウェアリミット(J3)[deg] |
4軸パラレルリンクロボットの場合
4軸パラレルリンクロボットを選択した場合は、4軸への動力伝達部分が伸縮機構になっているため、図中に示された伸縮長Lexの最大値と最小値を設定する必要があります。
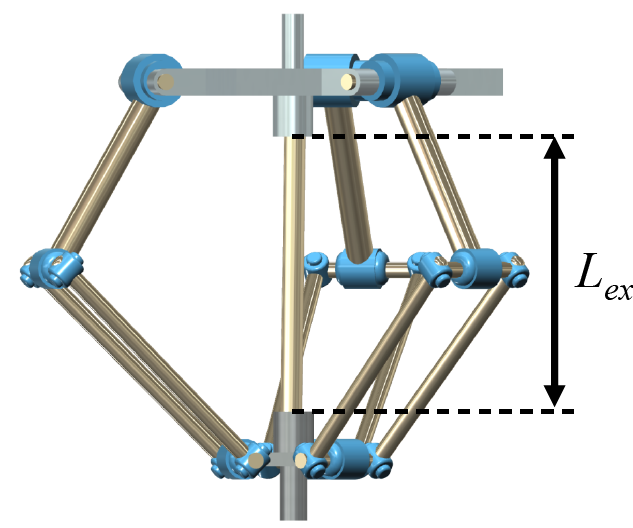
Lexは以下のパラメータで設定します。
| 番号 | 項目名 |
|---|---|
| 212 | 伸縮棒正方向ソフトウェアリミット(J4)[mm] |
| 213 | 伸縮棒負方向ソフトウェアリミット(J4)[mm] |
ID : 2973