
ID : 2786
補正する
ロボットの位置補正が必要な場合、3つの補正方法から選択します。
基準位置が登録されていないと補正方法を選択することはできません。
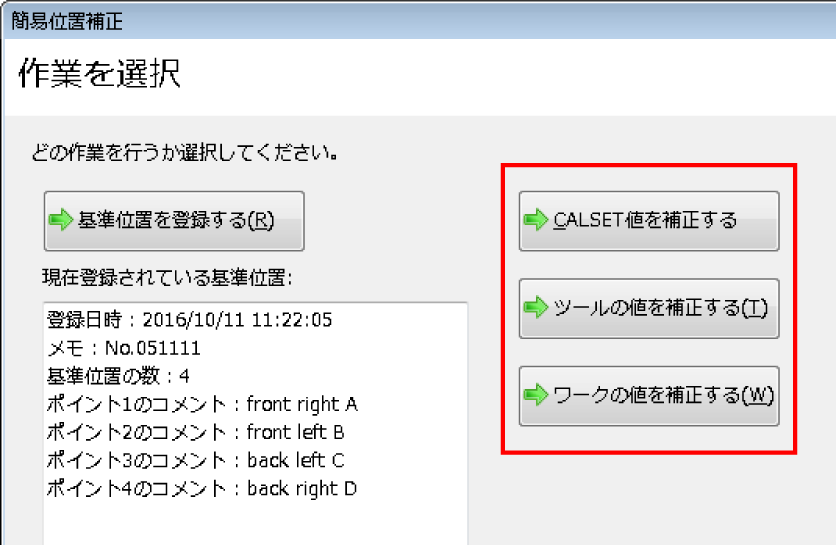
CALSET値を補正する
モータ交換時に発生した、各軸の位置ずれを補正します。
ツールの値を補正する
新規のツールを取付けた場合のツール設定値を求めることができます。ハンドの取付け位置がずれたり、曲がったりした場合に補正できます。
ワークの値を補正する
ロボットの据付位置を変更した場合に、事前に登録していたワーク座標をロボット据付位置のずれにあわせて補正できます。登録されている複数のワーク座標を一度に補正できます。
ID : 2786
- このページに関連する情報
- CALSET値を補正する
- ツールの値を補正する
- ワークの値を補正する