
ID : 2787
CALSET値を補正する
1
[CALSET値を補正する]を押すと、「補正の前に現在の値をバックアップします。」が表示されます。
[OK]を押すと現在のCALSET値がバックアップされます。
2
[補正対象軸]でCALSET値を補正する軸(モータ交換をした軸)を選択します。
選択する軸の数が多いほど補正計算の精度が低下しますので、補正が必要な軸のみを対象としてください。

3
あらかじめ登録した位置データを選択して、同じ位置を教示し、[取得]で登録します。
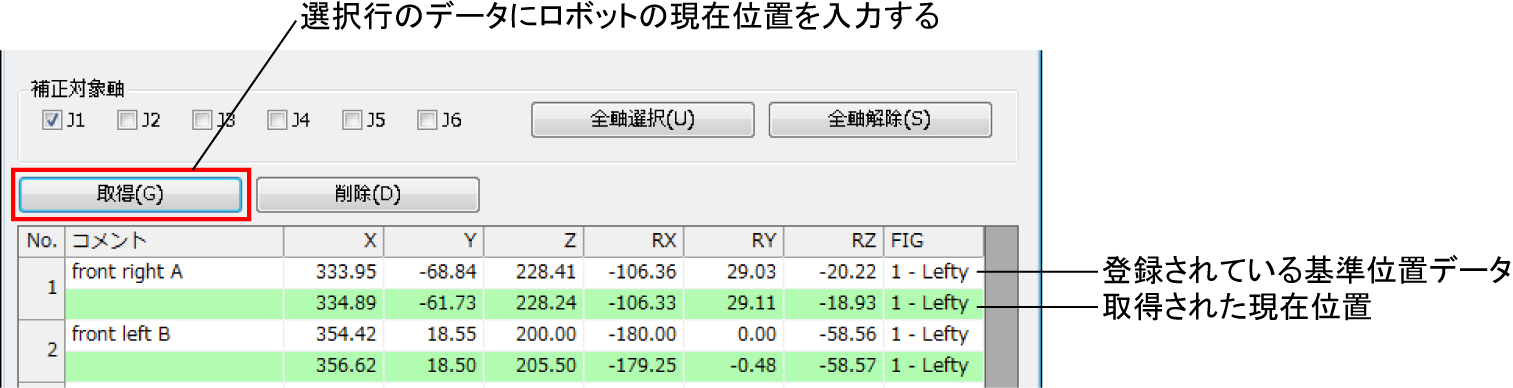
取得時には位置(X,Y,Z)を正確に教示してください。姿勢(Rx,Ry,Rz)は関係しません。
現在位置を取得する際は、「基準位置の登録」で示した準備が済んでいるか確認してください。
全ての点の現在値を取得できたら[次へ]を押します。
4
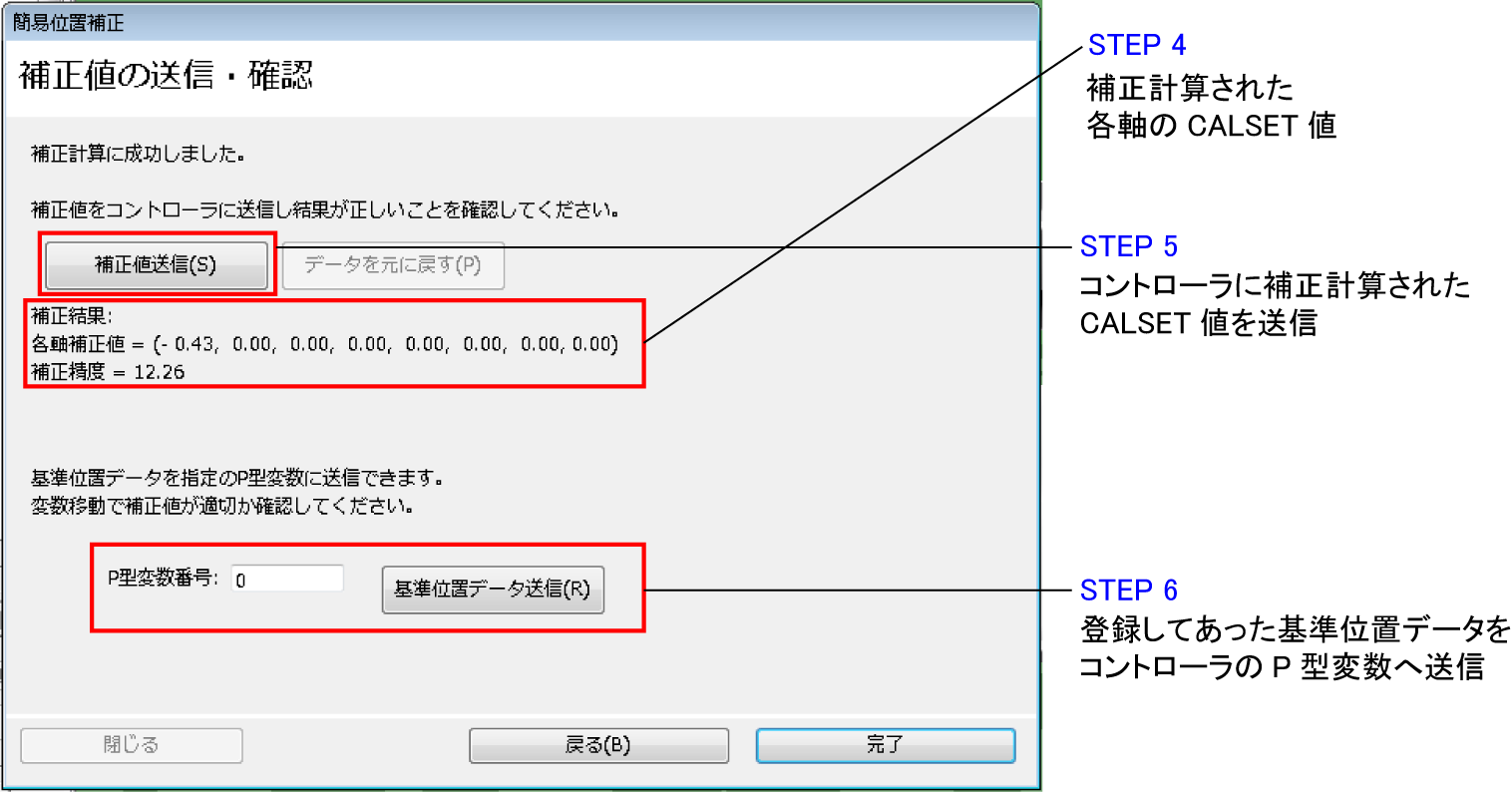
補正計算された各軸のCALSET値を確認します。
補正精度とはティーチングの精度を示す値です。計算された各軸補正値にした場合、登録されている基準位置データのずれ量の最大値です。単位はmmです。 基準位置を多く登録すると大きくなる傾向にあります。
5
補正計算された各軸のCALSET値をコントローラへ送信します。
6
登録してあった基準位置データをコントローラのP型変数へ送信します。
7
ティーチングペンダントでロボットをP型変数(基準位置)へ移動し、適切に補正されているか確認し、[完了]を押します。
補正が正しく行われていない場合は、データを元に戻し、再度、基準位置を教示し直します。
ID : 2787