
ID : 2785
基準位置登録手順
1
WINCAPSIIIで基準位置を登録するロボットのプロジェクトを開きます。
2
メニューで以下を選択します。
[ツール]-[簡易位置補正]
3
ロボットコントローラと接続します。
4
[簡易位置補正]ダイアログが表示されたら[基準位置を登録する]を選択します。
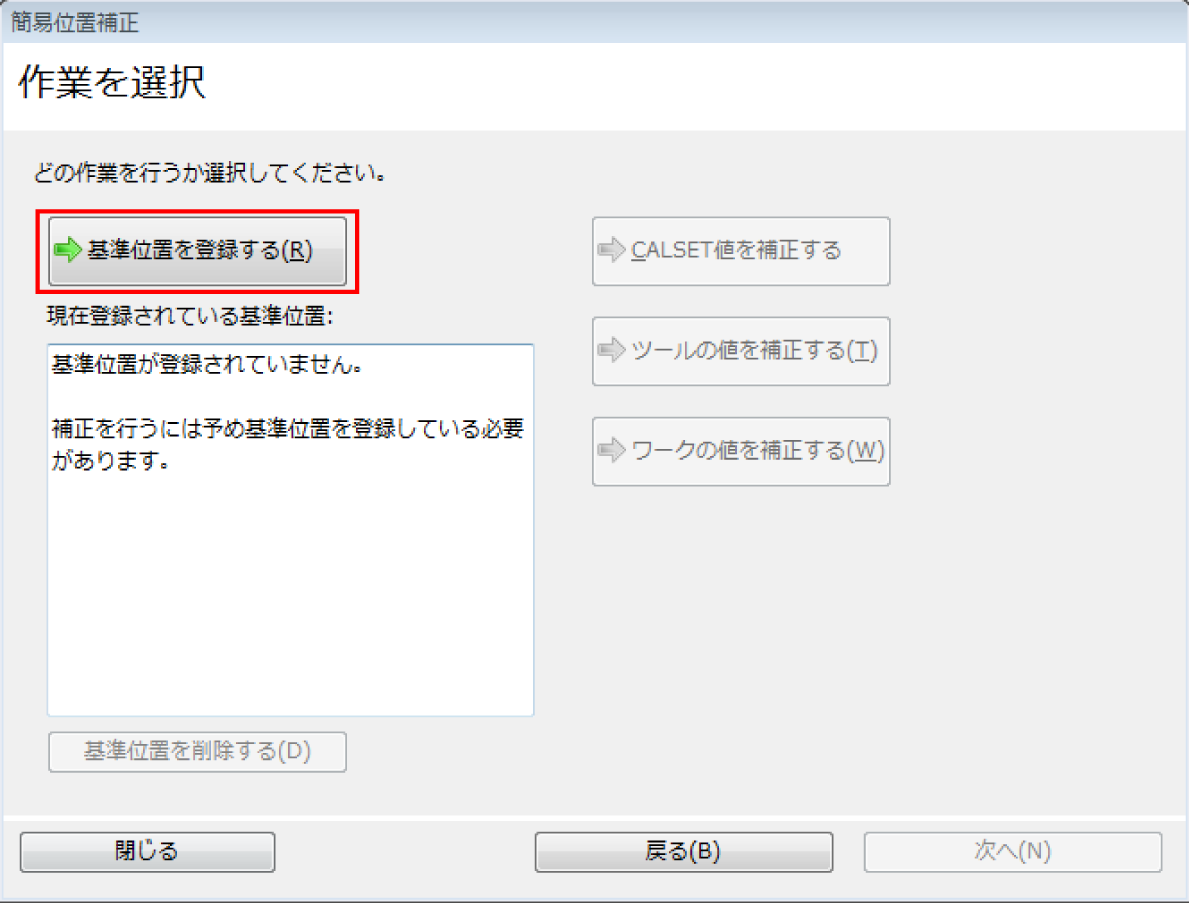
「基準位置登録前の準備」というメッセージが表示されますので、準備ができていることを確認し、[OK]を押します。
5
作成した基準位置にロボットを教示し[追加]を押すと、基準位置データにロボットの現在位置が登録されます。
登録した基準位置データを選択して[変更]を押すと、ロボットの現在位置を上書きします。
登録した基準位置データを選択して[削除]を押すと、選択した基準位置データが削除されます。

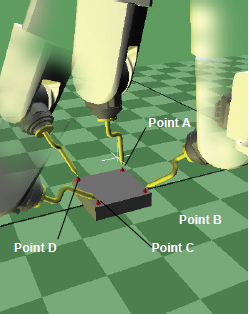
基準位置は多く登録するほど補正精度は高くなります。
基準位置の教示は全軸が動くように教示すると補正精度が高まります。
コメント欄やメモ欄に登録位置の名称を記述しておくと、識別しやすくなります。
6
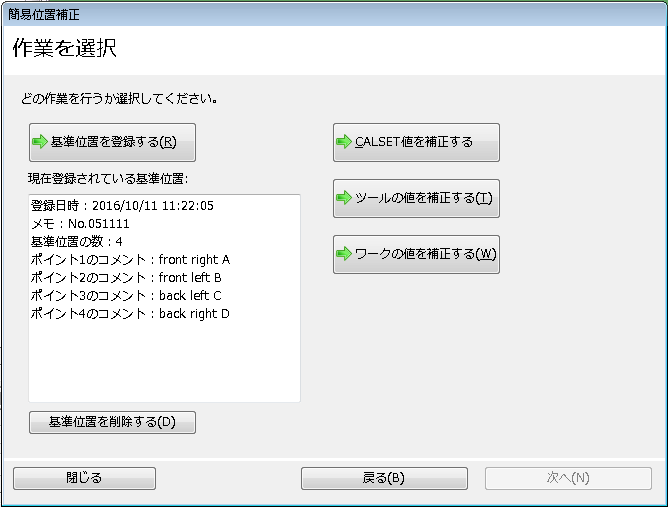
基準位置を全て登録したら[完了]を押します。
登録された基準位置データの概要が表示されますので確認をして閉じます。
登録された基準位置データはWINCAPSIIIのプロジェクトに保存されますので、プロジェクトを閉じるときは必ず保存してください。
ID : 2785