
ID : 2482
Safely-Limited Position (SLP)
機能
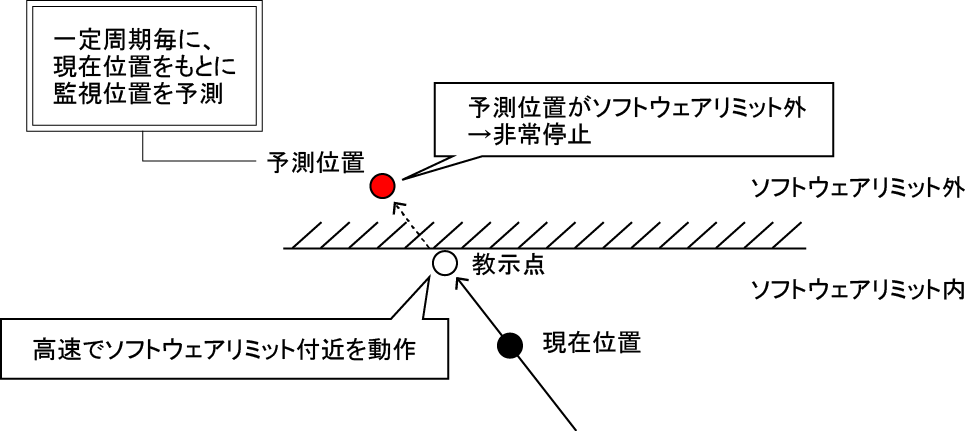
各軸がソフトウェアリミットを超えていないかを監視する機能です。
各軸のエンコーダ値を基に最大停止位置(直動軸の場合)または最大停止角度(回転軸の場合)を算出し、その値がソフトウェアリミットの範囲内にあるかを監視します。範囲外になると、SS1機能が働き、ロボットを停止しモータ電源をOFFします。
使用条件
| 入力信号 | 監視無効入力 |
|---|---|
| 出力信号 | SLP出力 |
| 監視対象 | ロボット各軸、付加軸 |
| 監視範囲設定 | 監視対象の各軸の角度/位置の範囲 |
| Reaction time | 50ms(Max) |
| Process Safety Time (PST) | 100ms |
| 実行モード | 自動モード、手動モード |
| 機能の開始タイミング |
|
注1:監視無効入力を使用する場合はセーフティパラメータの「15:監視無効入力設定」を「1:有効」にする必要があります。詳細は「監視無効入力」を参照してください。
注意事項
ソフトウェアリミット付近で高速動作させた場合、エラーが出ることがあります。
エラーが発生する場合、回避方法として、以下のものがあります。
- 教示点を、ソフトウェアリミットの内側方向にずらす。
- 教示点を通過する時の速度を下げる。
ID : 2482