
ID : 1495
電動ハンドのステータス
電動ハンドの状態は、電動ハンド画面にて確認します。-1 は点灯、0 は消灯を意味します。
また、コマンドを使用して状態を取得することもできます。
非常停止状態 (Hand[n].EmgState / SelectHand[m,n].EmgState )
非常停止入力状態を表します。
-1 :非常停止が解除されている状態です。(非常停止入力が短絡)
0 :非常停止状態です。
モータ (Hand[n].Motor / SelectHand[m,n].Motor )
モータ電源状態を表します。
-1 :モータ電源オン
0 :モータ電源オフ
動作状態 (Hand[n].BusyState / SelectHand[m,n].BusyState )
動作状態を表します。
-1 :動作中。動作コマンドが入りその信号を受け付けたとき。
0 :動作コマンドの受け付けが可能
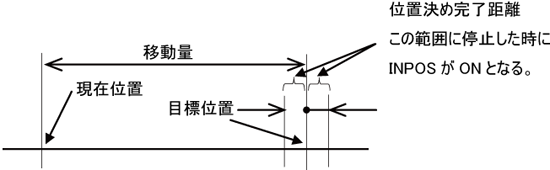
INPOS状態 (Hand[n].InposState )
目標位置に入っているかどうか(INPOS状態)を表します。
-1 :原点復帰、位置決め動作後、目標位置の範囲内
0 :目標位置の範囲外、または移動中
目標位置の範囲はパラメータの「位置決め完了距離」によって決まります。
| 動作モード | 目標位置 |
|---|---|
| 絶対位置移動 | 移動量の位置 |
| 相対位置移動 | 現在位置+移動量 |
| 加減速絶対位置移動・把持 | 移動量+リミット幅 |
| 加減速相対位置移動・把持 | 現在位置+移動量+リミット幅 |
| ZON付定速移動把持(閉)・定速移動把持(閉) | +ソフトリミットの位置(注1) |
| ZON付定速移動把持(開)・定速移動把持(開) | -ソフトリミットの位置(注1) |
注1:原点復帰方向(開)の時です。
原点復帰方向(閉)の時はソフトリミットが逆側になります。
ホールド (Hand[n].HoldState / SelectHand[m,n].HoldState )
ハンドの把持状態を表します。
-1 :ワークを設定した把持力で把持している
0 :把持していない
目標位置(上記INPOS項参照)に対して±1パルス以内では出力はOFFとなります。
1パルスあたりの移動距離(分解能) 単位(μm)
| 形式 | 距離 | 形式 | 距離 | 形式 | 距離 |
|---|---|---|---|---|---|
| SS-2005-3N | 31.4 | SD-2005 | 1.6 | ST-2004 | 31.4 |
| SS-2005-5N | 18.9 | SD-2810 | 1.7 | ST-2013 | 32.1 |
SS-2010 |
17.5 |
SD-4220 |
1.9 |
ST-2820 |
16.1 |
| SS-2815 | 10.6 | FS,FT-2020 | 1.6 | ST-4230 | 23.6 |
| SS-4225 | 15.7 | FS,FT-2840 | 1.3 |
注)ワークが傾いた状態で把持し、その後、爪が動いた場合ホールド信号はOFFします。
その後、正常に把持した場合でもホールド信号がONしない場合があります。
原点復帰完了 (Hand[n].OrgState / SelectHand[m,n].OrgState )
原点復帰状態を表します。
-1 :原点復帰が完了している
0 :原点復帰が完了していない(原点未了)
ゾーン (Hand[n].ZonState / SelectHand[m,n].ZonState )
電動ハンドが設定された範囲内に位置しているかどうかの状態を表します。
ZON付定速移動把持(閉)または(開)
-1 :範囲指定1から範囲指定2の間に位置している
0 :範囲指定の外に位置している
エラー (Hand[n].Error / SelectHand[m,n].Error )
エラーの状態を表します。
0以外:エラー発生状態。値はエラーコードを表します。
0 :正常な状態
エラーの内容は”エラーメッセージ一覧”を参照してください。
ID : 1495