
ID : 7922
プログラミング構成
Command-Slave機能で作成するプログラムの構成を、以下に示します。
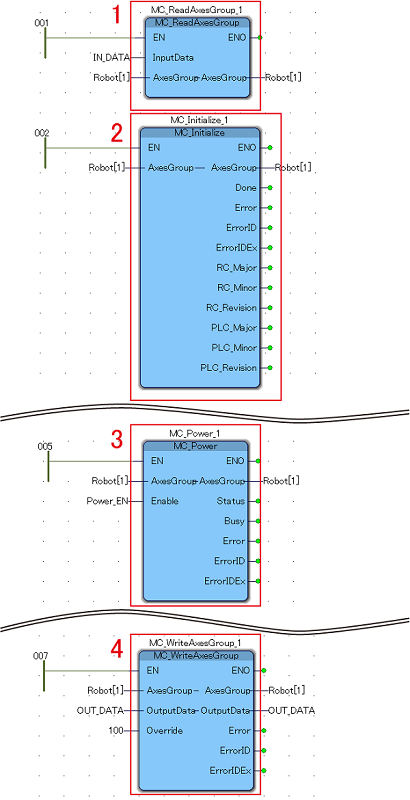
1.MC_ReadAxesGroup
ロボットコントローラから、ロボットの動作状況などのデータを取得し、"AxesGroup"に格納します。このFBで取得したデータは、Command-Slaveの他のFBでロボットを制御するために使用されます。
したがって、Command-Slave機能を使用する際は、このFBを必ずプログラムの最初に配置してください。
FBの詳細は、Command-Slaveリファレンスガイド_ProConOSの「MC_ReadAxesGroup」を参照してください。
2.MC_Initialize
PLCとロボットコントローラのCommand-Slaveのバージョンを取得し、同じかどうかを調べます。
PLCとロボットコントローラのCommand-Slaveのバージョンが一致しないと、ロボットが正しく動作しない可能性があります。また、最初の通信以降はPLCとロボットコントローラが正しく通信しているかを監視することができます。
したがって、"MC_ReadAxesGroup"以外のFBを配置する前に、このFBを配置してください。
FBの詳細は、Command-Slaveリファレンスガイド_ProConOSの「MC_Initialize」を参照してください。
3.MC_Power
FBカテゴリ"動作"のFBを実行可能状態にし、ロボットのモータをONにします。FBカテゴリ"動作"のFBは、実行する前に、このFBで実行可能状態にすることが必要です。
したがって、FBカテゴリ"動作"のFBより先に、このFBを配置してください。
FBの詳細は、Command-Slaveリファレンスガイド_ProConOSの「MC_Power」を参照してください。
4.MC_WriteAxesGroup
Command-Slaveの他のFBで更新された、"AxesGroup"内の指令をロボットコントローラへ送信します。ロボットコントローラはこのFBから送信された指令を受けて、ロボットを制御します。
したがって、Command-Slave機能を使用する際は、このFBを必ずプログラムの最後に配置してください。
FBの詳細は、Command-Slaveリファレンスガイド_ProConOSの「MC_WriteAxesGroup」を参照してください。
ID : 7922