
ID : 7716
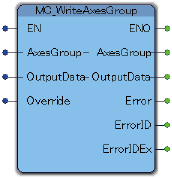
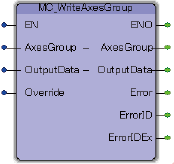
MC_WriteAxesGroup
ロボット変数の内容をロボットコントローラに送信します。また、ロボットコントローラの外部速度を変更します。
| グラフィック表示 | FBカテゴリ | |
|---|---|---|
| Ver.5.5 | Ver.5.35 | |
 |
 |
特殊 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
| OutputData | ARRAY[1..64] of DWORD | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Override | INT | 1 ~ 100 | 1.0 | 可能 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
機能説明
ロボット変数 (構造体 : eRC_AxesGroup) の内容をロボットコントローラに送信します。
実際には、ロボット変数 (構造体 : eRC_AxesGroup) の中にある、変数"Cmd"を、ロボットコントローラへ送信します。
OutputDataには、フィールドネットワークの通信設定で生成した出力タグを指定します。
フィールドネットワーク通信の設定方法は、PLCごとに異なります。ご使用のPLCの取扱説明書を参照してください。
注意事項
Command-Slaveの他のFBで更新された、変数"Cmd"(*1) の値は、このFBでロボットコントローラに送信します。変数"Cmd"の値がロボットコントローラに送信されないと、ロボットを制御できません。
したがって、このFBはプログラムの最後に配置してください。
*1 : 変数"Cmd"は、ロボット変数 (構造体 : eRC_AxesGroup) の中にある変数。
ID : 7716