
ID : 5331
セットアップ手順
概要
コンベアトラッキング/付加軸トラッキングのセットアップ手順の概要を以下に示します。
(1)ハードウェアの選択
「コンベア・デバイスの選択」、「エンコーダ軸番号設定」、「I/O設定」を実施します。
(2)ハードウェアの接続確認
「軸,I/O確認」を実施します。
(3)キャリブレーション
コンベア、センサ(ビジョンセンサ)、ロボットに関して、それぞれの正確な位置関係を計測します。
詳細手順
センサトラッキング、ビジョントラッキングで細かい設定手順が異なります。
センサトラッキングに関しては「センサトラッキングのセットアップ」を参照してください。
ビジョントラッキングに関しては「ビジョントラッキングのセットアップ」を参照してください。
付加軸トラッキングの場合は、セットアップの前に付加軸のセットアップが必要です。詳細は「付加軸立上げ手順(ボールねじ)」を参照してください。
既存のロボットコントローラへのコンベアトラッキング機能の追加
既存のロボットコントローラへコンベアトラッキング機能を追加する場合、コンベアトラッキング機能のライセンスや、エンコーダハブなどが必要です。
詳細は、弊社営業にお問い合わせください。
なお、ロボットコントローラへコンベアトラッキング機能を追加する際、お客様にて、ロボットコントローラのプロジェクトデータを、付加軸用のプロジェクトに変更していただく場合があります。
その場合は、下記手順で実施してください。
プロジェクトデータを付加軸用に変更する手順
WINCAPSIIIにて、ロボットコントローラからデータを取得し、付加軸用のプロジェクトに変更した後、ロボットコントローラにデータを送信します。
1
WINCAPSIIIを使用します。
| 操作経路:[ファイル] - [プロジェクトの新規作成] |
「コントローラから情報を取得して新規作成する」を選択し、データを作成します。
詳しくは「プロジェクトの新規作成」を参照してください。
2
| 操作経路:[プロジェクト] - [プロパティ] |
プロジェクト情報タブの[付加軸変更]ボタンで、"付加軸あり"に変更します。
詳しくは「プロジェクト情報」タブの"ロボット"を参照してください。
3
| 操作経路:[通信] - [データ送受信] |
WINCAPSIIIのローカルデータを選択し、「送信」を押します。
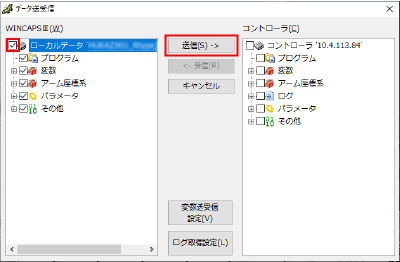
送信が完了したら、コントローラを再起動してください。
ID : 5331
- このページに関連する情報
- センサトラッキングのセットアップ
- ビジョントラッキングのセットアップ