
ID : 4406
プロジェクトの設定
I/Oの割付や、変数の使用個数などの設定を確認、変更することができます。
1
「プロジェクト」メニューから「プロパティ」を選択します。
「プロジェクトのプロパティ」ダイアログが表示されます。
2
設定する項目のタブをクリックし、各項目を設定します。
3
設定が完了したら、「OK」ボタンをクリックします。
「キャンセル」ボタンをクリックすると、設定した内容は破棄されます。
設定中に他のタブに移動しても、「OK」ボタンをクリックするまでは変更内容は反映されません。設定の変更を有効にするためには、必ず「OK」ボタンをクリックしてください。
「プロジェクトのプロパティ」ダイアログは以下のタブで構成されています。
「プロジェクト情報」タブ
プロジェクトに関連する情報を表示します。
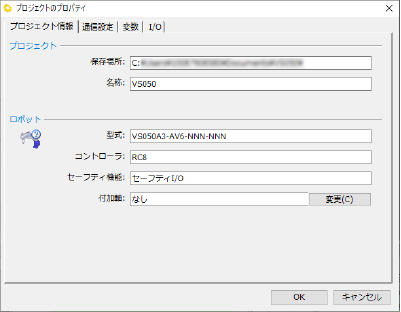
プロジェクト
プロジェクトの保存先フォルダと、名称を表示します。
ロボット
コントローラの種類と、ロボットのタイプを表示します。[付加軸変更]ボタンで、ロボットタイプの付加軸あり/なしを切替えます。
「通信設定」タブ
ロボットコントローラとの通信方法や通信オプションを設定します。
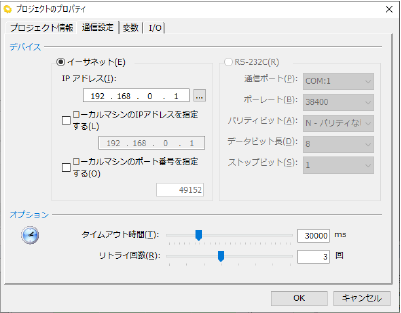
「イーサネット」
ロボットコントローラのIPアドレスを入力します。
- IPアドレス
ロボットコントローラのIPアドレスを入力します。 - ローカルマシンのIPアドレスを指定する
PCにネットワークカードが複数ある場合に使用するネットワークカードを指定して接続できます。ネットワークカードのIPアドレスを指定します。 - ローカルマシンのポート番号を指定する
PCのポート番号を指定して接続したい場合はチェックを入れて、ポート番号を入力します。
「RS-232C」
RS-232C通信の詳細通信設定をロボットコントローラの設定に合わせて入力します。
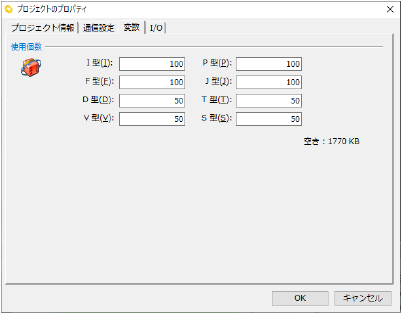
「変数」タブ
変数の使用個数を設定します。
ロボットコントローラ側のプロジェクトの変数使用個数と合わせて設定してください。
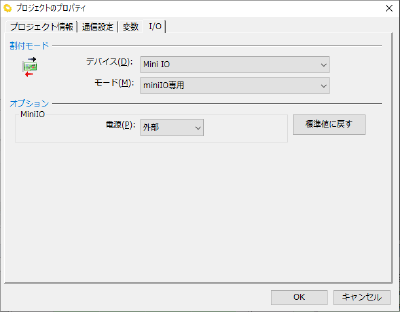
「I/O」タブ
I/O の割付モードおよびオプションを設定します。
I/Oの各デバイスの詳細仕様、設定については各ボードの取扱説明書を参照してください。
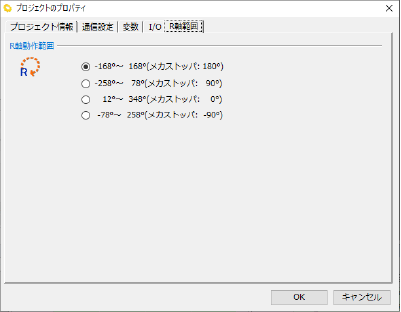
「R軸範囲」タブ
XRシリーズロボットのみ表示されます。
コントローラのR軸動作範囲を変更することができます。
詳しい操作方法はXRロボット取扱説明書の「WINCAPSIIIでのR軸範囲の変更」を参照してください。
ID : 4406