
ID : 4846
WINCAPSIIIでのR軸動作範囲の変更
WINCAPSIIIからコントローラのR軸動作範囲を変更することができます。
1
WINCAPSIIIを立上げ、プログラマでログインします。
WINCAPSIIIでXRシリーズロボットのプロジェクトを作成します。
2
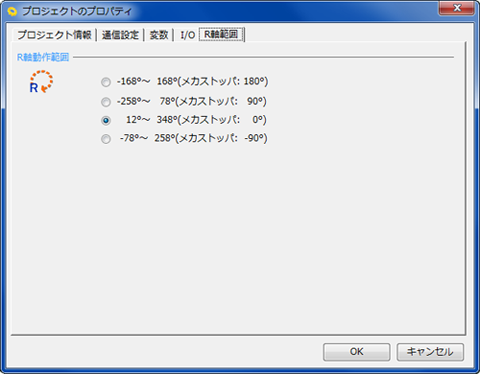
[プロジェクト(P)]-[プロパティ(P)]を選択し「R軸範囲」タブをクリックします。
3
動作範囲を選択して[OK]を押します。
動作範囲は「第2軸(R軸)メカエンドの変更」を参考にして選択してください。
4
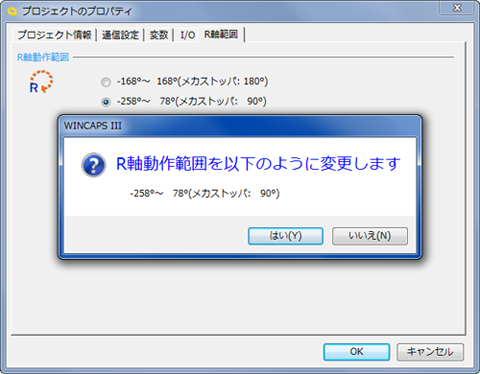
確認のメッセージが表示されますので、動作範囲角度とメカストッパの位置を確認して、[はい]を押します。
5
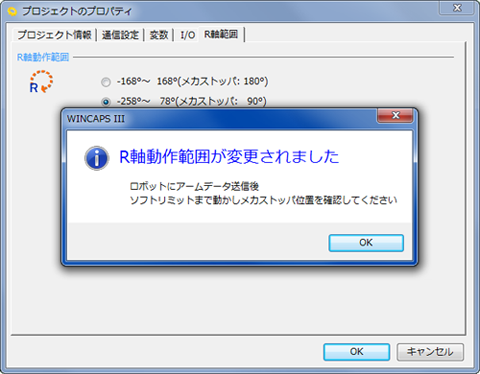
WINCAPSIII内のプロジェクトのR軸動作範囲が変更されました。
6
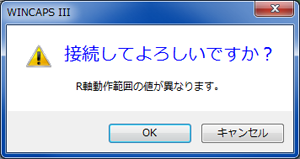
プロジェクトのアームデータをWINCAPSIIIからロボットコントローラに送信します。
[通信(N)]-[データ送受信(T)]を選択します。
ロボットコントローラのR軸動作範囲とWINCAPSIIIのプロジェクトのR軸動作範囲のデータが異なるので確認のメッセージが表示されます。
[OK]を押してください。
7
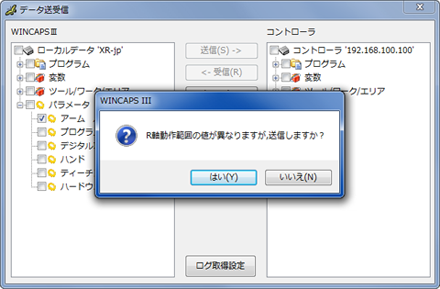
[WINCAPSIII]側のウインドウから<パラメータ>内の<アームパラメータ>にチェックを入れます。
確認メッセージが表示されます。
[はい(Y)]を押してください。
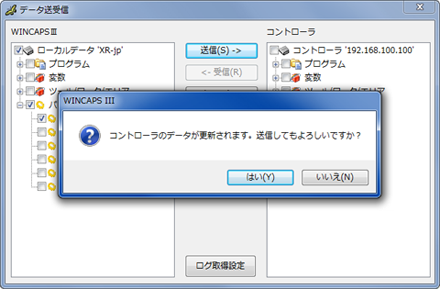
[送信(S)]ボタンを押します。
8
データ更新の確認メッセージが表示されます。
[はい(Y)]を押します。
9
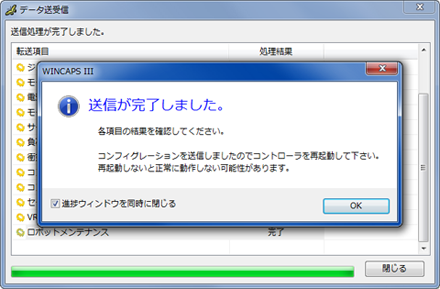
R軸動作範囲のデータがロボットコントローラに送信され、ロボットコントローラのR軸動作範囲のデータが更新されました。
ロボットのR軸を動かし、適切な動作範囲となっていることを確認してください。
ID : 4846