
ID : 4845
ティーチングペンダントでのR軸動作範囲の変更
ティーチングペンダントでR軸動作範囲を下記の画面で設定します。
1
ティーチングペンダントの基本画面より、[F2 アーム]-[F12 保守]を押すと「保守」ウィンドウが表示されます。
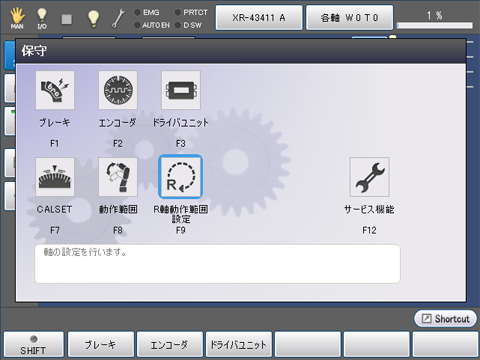
[F9 R軸動作範囲設定]を押します。
2
[R軸動作範囲設定]ウィンドウが表示されます。
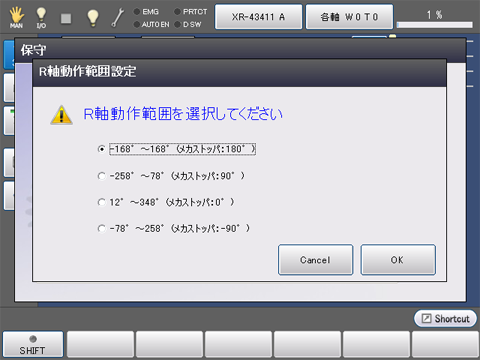
移動したメカストッパの位置の選択肢を選択し、[OK]を押してください。
R 軸動作範囲をWINCAPSIIIで変更する場合は「WINCAPSIIIでのR軸動作範囲の変更」を参照し、行ってください。
3
R軸をメカストッパ付近に動かします。ソフトウェアリミットが正しい位置に設定されているかを下記の手順で確認します。
メカストッパ方向に徐々にアームを近づけます。メカストッパの直近で[ソフトリミットオーバ]のエラーでロボットが停止したら、正しく設定されています。
アームがメカストッパにあたってしまった場合はもう一度、設定しなおしてください。
ID : 4845