
ID : 4844
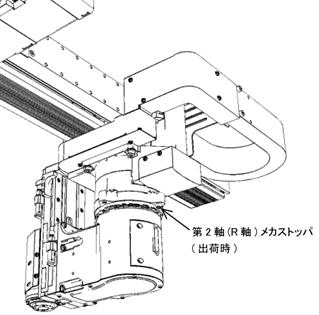
第2軸(R軸)メカエンド変更の方法
第2軸(R軸)のメカエンドの変更は出荷時に取付いている第2軸(R軸)メカエンドの六角穴付ボルト位置を変更した後、ティーチングペンダントまたはWINCAPSIIIでR軸動作範囲を変更することにより行います。
手順は以下の通りです。
1
ロボットコントローラの電源スイッチを「入り」にし、ティーチングペンダントのモード切替スイッチを[MANUAL]にします。
2
基本画面で[F2 アーム]を押します。
第2軸(R軸)をティーチングペンダントで動かし、12°~78°の位置に移動します。

3
モータ電源ボタンを押してモータ電源をOFFしてください。
可動範囲内で作業をするときはロボットが動かないよう十分に注意をしてください。
4
メカストッパボルトを外し、変更したい位置に付け替えます。
変更位置は「第2軸(R軸)メカエンドの変更」を参照してください。
締め付けトルク:9.8±2.0 N・m
六角穴付ボルト:M6×12(1本)[強度区分10.9]
5
モータ電源ボタンを押してモータ電源をONしてください。
作業者が可動範囲内にいないことを確認してください。
R軸動作範囲の変更方法は「ティーチングペンダントでのR軸動作範囲の変更」または「WINCAPSIIIでのR軸動作範囲の変更」を参照してください。
ID : 4844