
ID : 5231
Z軸方向への移動(Approach,Depart)
ロボットがワークをつかみに行ったり置きに行く際、自由に目的の位置に行くようにすると、設備などに衝突してしまうことがあります。これを防止するためには、一度離れた場所に停止し、そこから直線的に目的の位置に動作するよう制御します。
また、目的の位置から離れる場合も同様に、直線的に戻り、そこから次の目的の位置へ移動するようにします。
この時の離れた場所の割出しは計算が複雑なため、これを自動で行って簡単に制御するために、ApproachコマンドとDepartコマンドが用意されています。
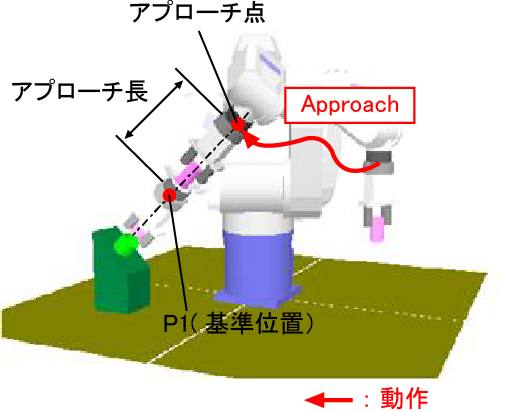
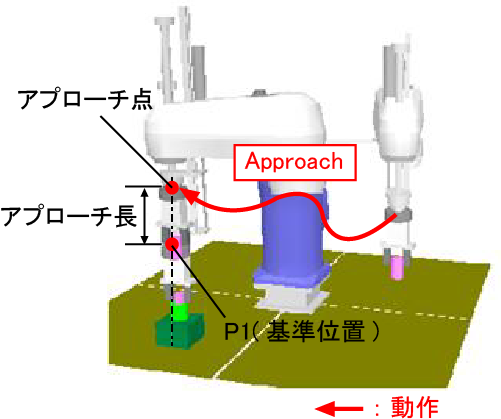
ハンド方向への接近移動(Approachコマンド)
機能
基準位置に対し、ツール座標のZ軸方向に指定した距離の点(アプローチ点)に移動します。
書式
Approach 動作補間, 基準位置, アプローチ長[, 動作オプション]説明
- 動作補間にはP(PTP制御)、L(CP制御)のどちらかの選択ができます。
- 基準位置にはP型、J型、T型が使用できます。
- アプローチ長を単精度実数型データで指定します。アプローチ長には目標位置オプションを付加できます。
- 動作オプションの内容はMoveコマンドと同じです。
用例
Approach P, P1, @P 50
'変数P1からツール座標の-Z軸方向50mmの点にパス動作にてPTP制御で移動します。| 6軸ロボット | 4軸ロボット |
|---|---|
 |
 |
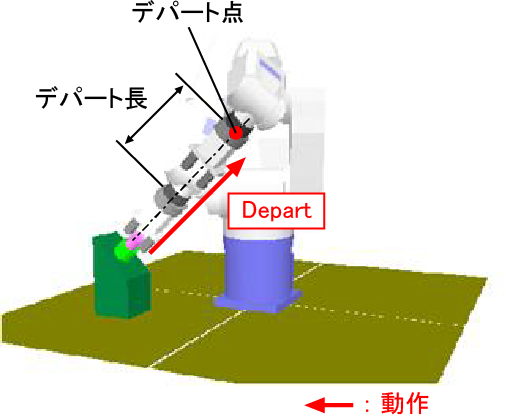
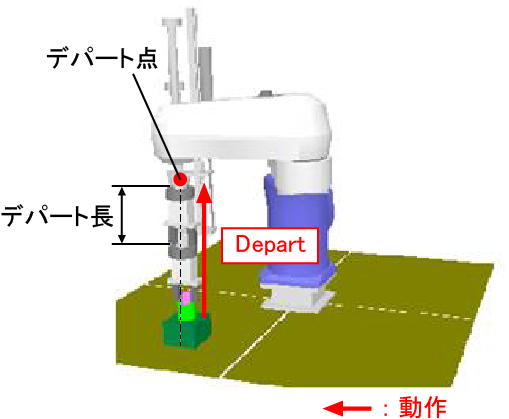
ハンド方向への回避移動 (Departコマンド)
機能
現在位置から、ツール座標の-Z軸方向に指定した距離だけ離れた点(デパート点)へ移動します。
主に、対象物から離れる際に使用します
書式
Depart 動作補間, デパート長[, 動作オプション]説明
- 動作補間にはP(PTP制御)、L(CP制御)のどちらかの選択ができます。
- デパート長を単精度実数型データで指定します。デパート長には目標位置オプションを付加できます。
- 動作オプションの内容はMoveコマンドと同じです。
用例
Depart L, @P 50
'変数P1からツール座標の-Z軸方向50mmの点にパス動作にてCP制御で移動します。| 6軸ロボット | 4軸ロボット |
|---|---|
 |
 |
ID : 5231