
ID : 5110
検出レベルの設定
ティーチングペンダントまたはコマンドを使用して、衝突検出の感度(検出レベル)を各軸毎に定格比(%)で設定します。入力範囲は、自動操作時は"0~1000%"、手動操作時は"0~100%"で、値を大きくすると感度が鈍り、小さくすると鋭くなります。
ティーチングペンダントで行なった設定は、コントローラ電源OFF後も保持されます。コマンドでの設定は、コントローラ電源OFF後、元の設定に戻ります。
コマンドの詳細については、「SetCollisionDetection」を参照ください。
自動・ティーチチェック時の設定手順
ティーチングペンダント操作による、自動・ティーチチェック時の設定手順を示します。
設定には、全軸のレベルを一括して設定する方法と、軸毎に個別にレベルを設定する方法があります。
ロボット動作中のレベル設定はできません。
全軸のレベルを一括して設定する手順
この方法はVer.2.7.*から有効です。
1
ロボットを動作させ、制御ログを記録します。
2
「衝突検出設定画面」で検出レベルを設定するテーブルのいずれかの軸番号を選択し、[F4 簡単教示]を押します。

「簡単教示設定画面」が表示されます。
3
[F1 グラフ更新]を押し、制御ログを読み込みます。
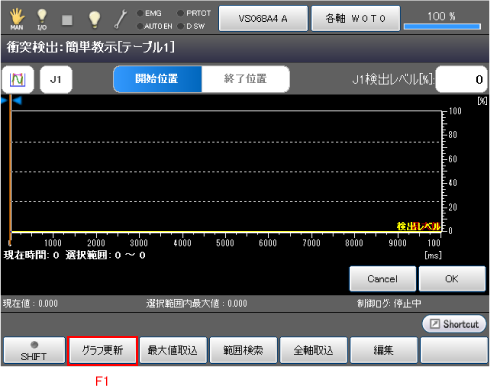
STEP1で記録した、制御ログが読み込まれます。
4
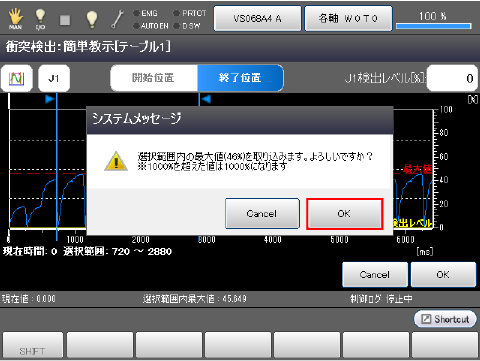
[F4 全軸取込]を押します。
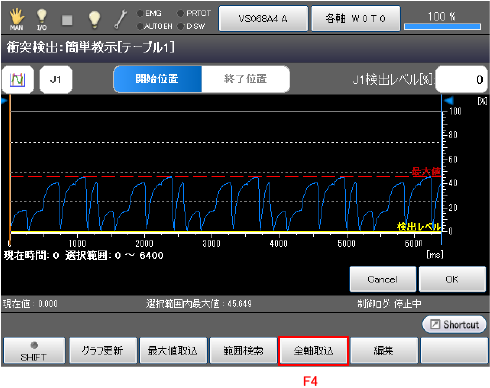
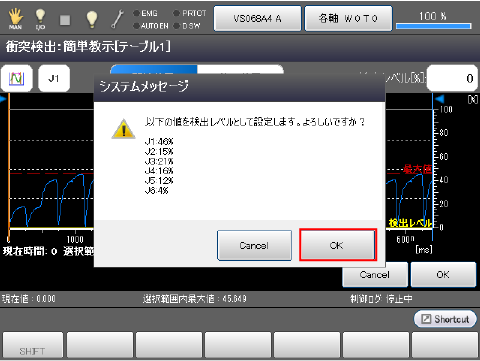
システムメッセージが表示されますので、良ければ[OK]を押します。
[Cancel]を押すと、設定は変更されません。
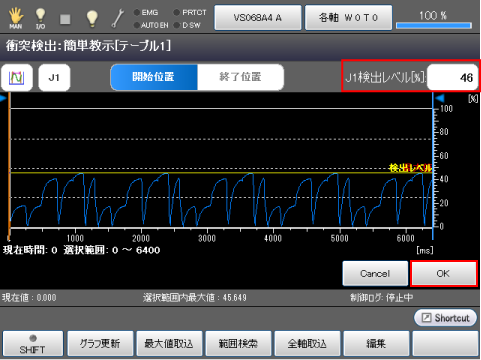
最大値を取り込む範囲は、デフォルトでは、制御ログの全範囲が対象になっています。対象範囲を変更したい場合は、開始位置、終了位置を変更します。[開始位置]、[終了位置]のボタンを押して選択し、左右の矢印キーで範囲の変更ができます。
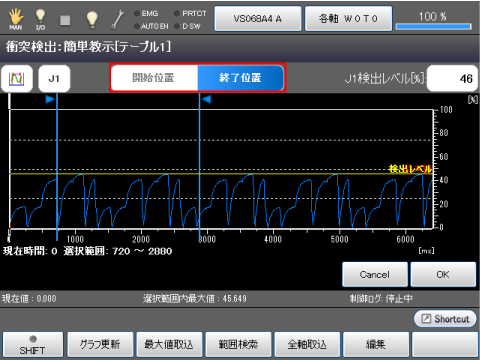
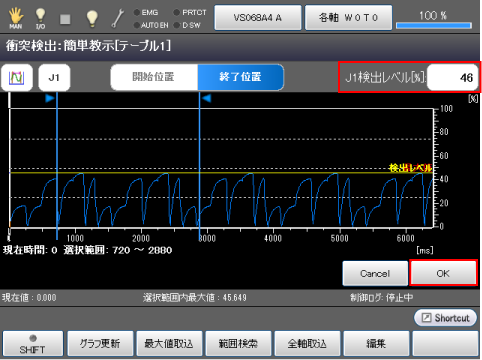
5
最大値が「検出レベル表示欄」に取り込まれます。良ければ[OK]を押します。
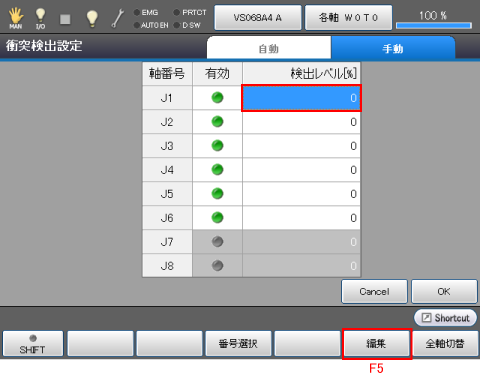
6
全軸の最大値が読み込まれます。しかし、最大値のまま設定すると衝突検知してしまいますので、軸毎に最大値よりも大きな値を設定します。
軸番号を選択し、[F5 編集]を押します。
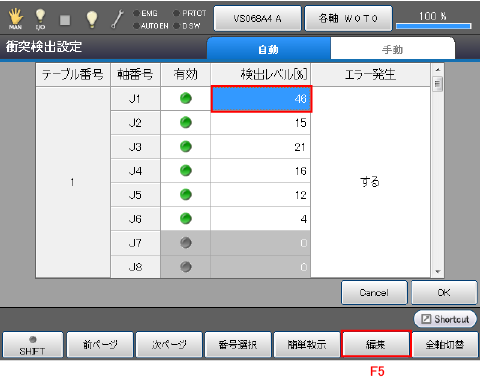
テンキーが表示されますので、値を入力し、[OK]を押します。

7
全ての軸の設定が完了後、[OK]を押します。
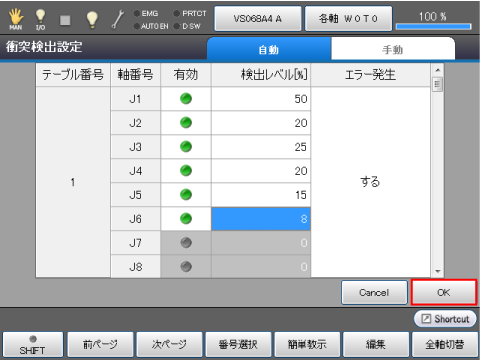
設定が保存され、衝突/干渉メニュー画面に戻ります。
軸毎に個別にレベルを設定する方法
軸毎に個別にレベルを設定する場合は、上記「全軸のレベルを一括して設定する手順」のSTEP4で、軸を選択して、[F2 最大値取込]を押します。軸表示のアイコンをタッチすると軸を選択することができます。
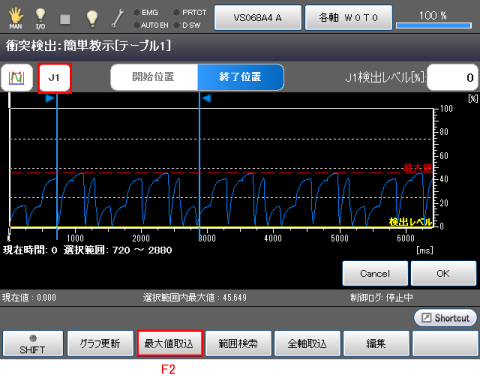
下図のシステムメッセージが表示されますので、良ければ[OK]を押します。
[Cancel]を押すと、設定は変更されません。
最大値が「検出レベル表示欄」に取り込まれます。
設定が必要な軸について同様に取り込みます。全部取り込み終わったら[OK]を押します。
その他の手順は、「全軸のレベルを一括して設定する手順」と同じです。
手動操作時の設定手順
手動操作時のティーチングペンダント操作による設定手順を示します。
1
検出レベルを設定する軸番号を選択し、[F5 編集]を押します。
2
テンキーが表示されますので、値を入力し、[OK]を押します。

入力した値は、以下のように表示されます。

3
設定が必要な軸の割合を、STEP1とSTEP2の手順で入力します。
4
全ての軸の設定が完了後、[OK]を押します。

設定が保存され、衝突/干渉メニュー画面に戻ります。
ID : 5110