
ID : 5107
キャリブレーション手順
1
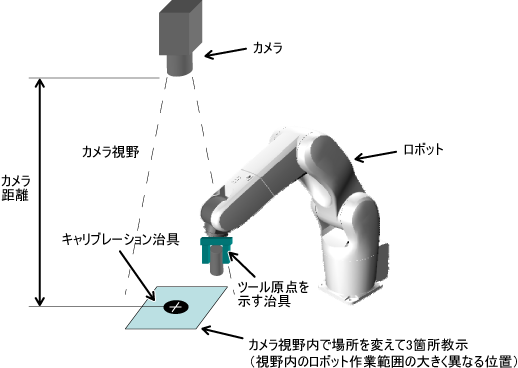
事前に下記の準備をします。
- ツール定義の原点位置をより正確に教示するために、ツール原点を示す治具を用意します。
- 視覚装置で認識可能なマーク1つのキャリブレーション治具を用意します。
- 下図のように、実際の作業と同じ認識になるカメラ距離、視野サイズでレイアウトします。
2 ポイント1の視覚座標を登録
ポイント1の視覚座標を登録します。登録方法は2つあります。
2-1 視覚座標の手入力
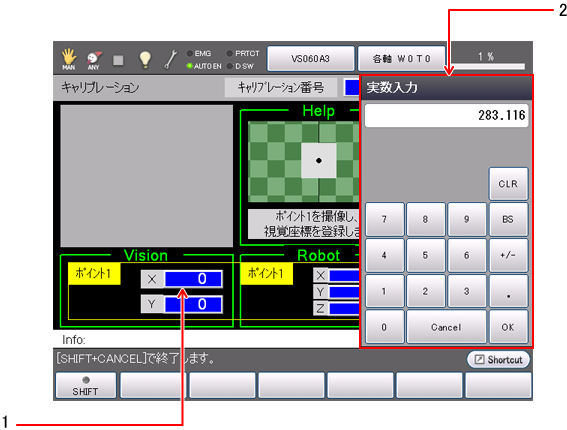
カメラでポイント1を撮像し、座標を読取ります。読取った座標を次の手順で入力します。
1の座標部分をタッチすると2の数値入力画面が表示されます。視覚装置で読取った視覚座標(X、Y)を入力し、[OK]ボタンを押します。
2-2 視覚座標の自動入力
対応機種の視覚装置をお使いの場合、マークの重心位置の視覚座標を自動入力できます。

視覚プログラムおよびロボットプログラム(TSR10.pcs)を作動させた状態で[視覚座標取得]ボタンを押すと、マークの重心位置を読取り、視覚座標を自動取得します。
取得した結果はVisionウィンドウに表示されます。
3 ポイント1のロボット座標を登録
視覚座標を読取った治具は動かさずにロボットを移動し、マークの重心位置にロボットのツール原点を合わせ、ロボット座標を読取り登録します。

[ロボット座標取得]ボタンを押すと、ロボット座標が読取られ、Robotウィンドウに表示されます。
4 ポイント2の座標を登録
治具の位置を変更してポイント2の視覚座標、ロボット座標を登録します。

[ポイント2]のボタンを押すと2箇所目の視覚座標、ロボット座標が登録可能になります。
ポイント1と同様に登録します。
5 ポイント3の座標を登録
同様に、治具の位置を変更して、ポイント3の視覚座標及びロボット座標を登録します。

[ポイント3]のボタンを押すと3箇所目の視覚座標、ロボット座標が登録可能になります。
ポイント1と同様に登録します。
6 キャリブレーションデータの計算

[キャリブレーション]のボタンを押すと、登録したポイント1~3のデータに基づきCalDataが計算され、CalDataに結果が表示されます。
結果確認画面でもCalDataの計算結果を確認できます。
また、キャリブレーション番号0~31に別のキャリブレーション結果を登録することも可能です。
7 キャリブレーションデータの保存
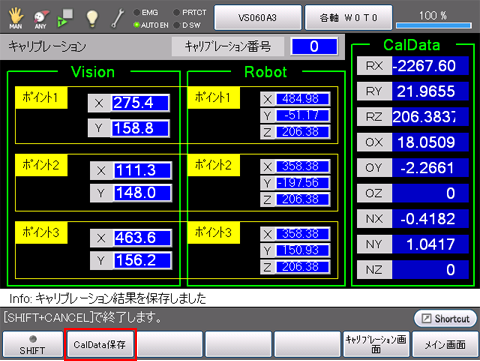
キャリブレーション結果を保存するために、結果画面へ切替え、[CalData保存]ボタンを押します。
以上でキャリブレーション作業は終了です。
この保存操作を行わないとCalDataの保存は行われません。
ID : 5107